 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePart Detector Discovery in Deep Convolutional Neural Networks
Paper and Code
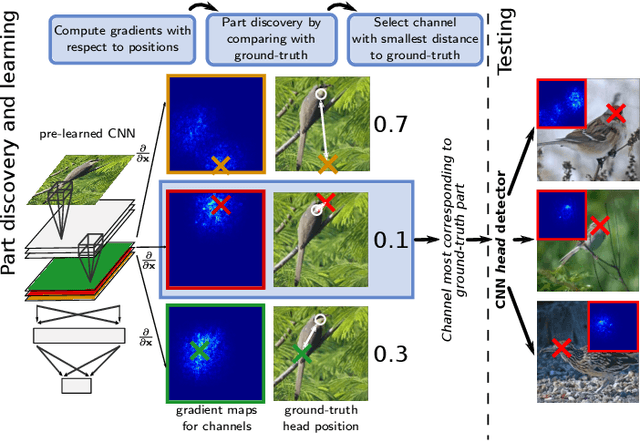
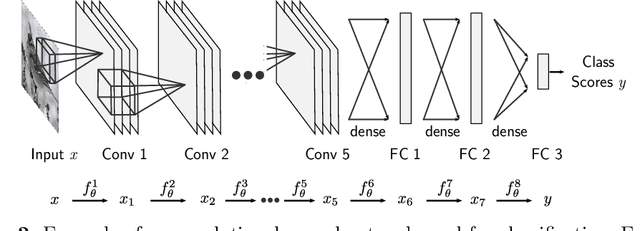

Current fine-grained classification approaches often rely on a robust localization of object parts to extract localized feature representations suitable for discrimination. However, part localization is a challenging task due to the large variation of appearance and pose. In this paper, we show how pre-trained convolutional neural networks can be used for robust and efficient object part discovery and localization without the necessity to actually train the network on the current dataset. Our approach called "part detector discovery" (PDD) is based on analyzing the gradient maps of the network outputs and finding activation centers spatially related to annotated semantic parts or bounding boxes. This allows us not just to obtain excellent performance on the CUB200-2011 dataset, but in contrast to previous approaches also to perform detection and bird classification jointly without requiring a given bounding box annotation during testing and ground-truth parts during training. The code is available at http://www.inf-cv.uni-jena.de/part_discovery and https://github.com/cvjena/PartDetectorDisovery.