 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParameterized Complexity and Kernel Bounds for Hard Planning Problems
Paper and Code
Jan 21, 2013
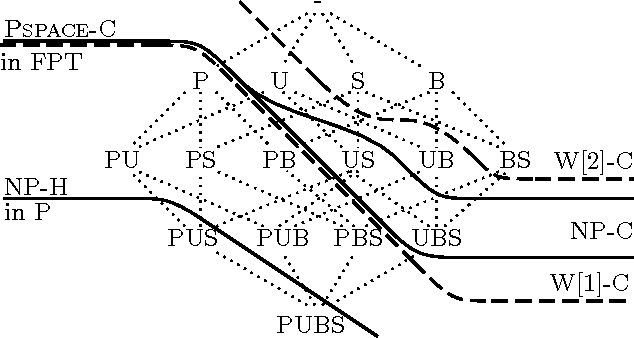
The propositional planning problem is a notoriously difficult computational problem. Downey et al. (1999) initiated the parameterized analysis of planning (with plan length as the parameter) and B\"ackstr\"om et al. (2012) picked up this line of research and provided an extensive parameterized analysis under various restrictions, leaving open only one stubborn case. We continue this work and provide a full classification. In particular, we show that the case when actions have no preconditions and at most $e$ postconditions is fixed-parameter tractable if $e\leq 2$ and W[1]-complete otherwise. We show fixed-parameter tractability by a reduction to a variant of the Steiner Tree problem; this problem has been shown fixed-parameter tractable by Guo et al. (2007). If a problem is fixed-parameter tractable, then it admits a polynomial-time self-reduction to instances whose input size is bounded by a function of the parameter, called the kernel. For some problems, this function is even polynomial which has desirable computational implications. Recent research in parameterized complexity has focused on classifying fixed-parameter tractable problems on whether they admit polynomial kernels or not. We revisit all the previously obtained restrictions of planning that are fixed-parameter tractable and show that none of them admits a polynomial kernel unless the polynomial hierarchy collapses to its third level.