 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePanoptic 3D Scene Reconstruction From a Single RGB Image
Paper and Code
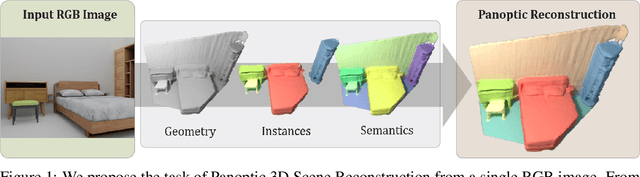
Understanding 3D scenes from a single image is fundamental to a wide variety of tasks, such as for robotics, motion planning, or augmented reality. Existing works in 3D perception from a single RGB image tend to focus on geometric reconstruction only, or geometric reconstruction with semantic segmentation or instance segmentation. Inspired by 2D panoptic segmentation, we propose to unify the tasks of geometric reconstruction, 3D semantic segmentation, and 3D instance segmentation into the task of panoptic 3D scene reconstruction - from a single RGB image, predicting the complete geometric reconstruction of the scene in the camera frustum of the image, along with semantic and instance segmentations. We thus propose a new approach for holistic 3D scene understanding from a single RGB image which learns to lift and propagate 2D features from an input image to a 3D volumetric scene representation. We demonstrate that this holistic view of joint scene reconstruction, semantic, and instance segmentation is beneficial over treating the tasks independently, thus outperforming alternative approaches.