 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOvercoming Referential Ambiguity in Language-Guided Goal-Conditioned Reinforcement Learning
Paper and Code
Sep 26, 2022
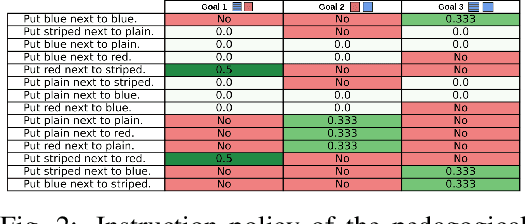
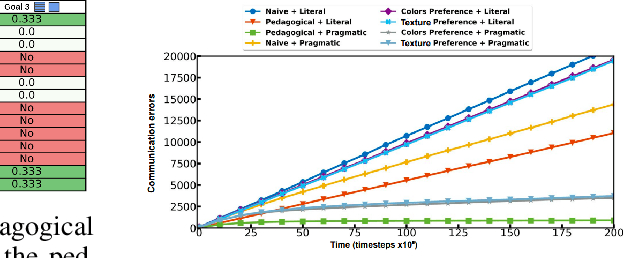
Teaching an agent to perform new tasks using natural language can easily be hindered by ambiguities in interpretation. When a teacher provides an instruction to a learner about an object by referring to its features, the learner can misunderstand the teacher's intentions, for instance if the instruction ambiguously refer to features of the object, a phenomenon called referential ambiguity. We study how two concepts derived from cognitive sciences can help resolve those referential ambiguities: pedagogy (selecting the right instructions) and pragmatism (learning the preferences of the other agents using inductive reasoning). We apply those ideas to a teacher/learner setup with two artificial agents on a simulated robotic task (block-stacking). We show that these concepts improve sample efficiency for training the learner.