 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOutput Reachable Set Estimation and Verification for Multi-Layer Neural Networks
Paper and Code
Feb 20, 2018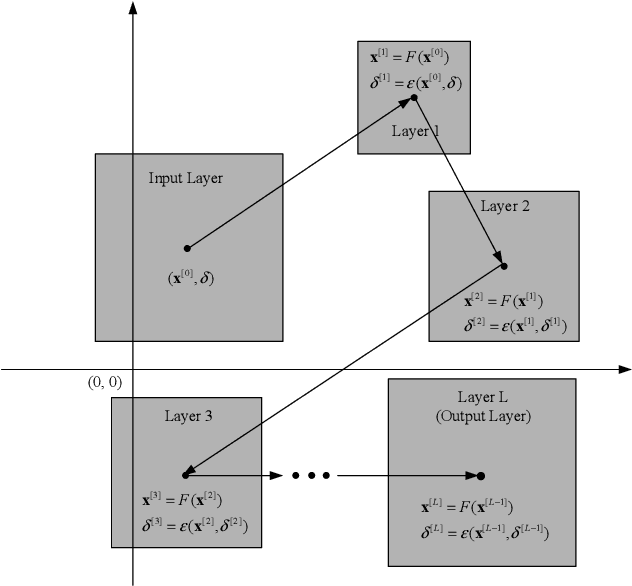
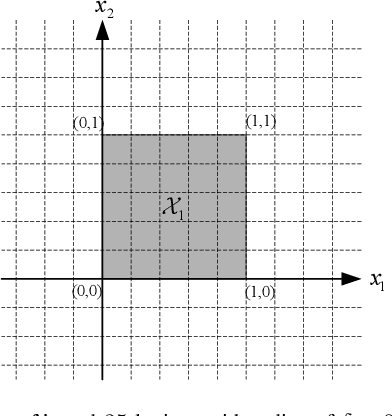
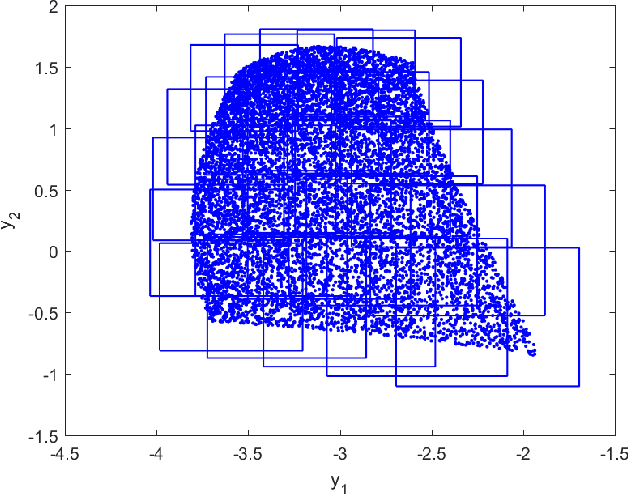
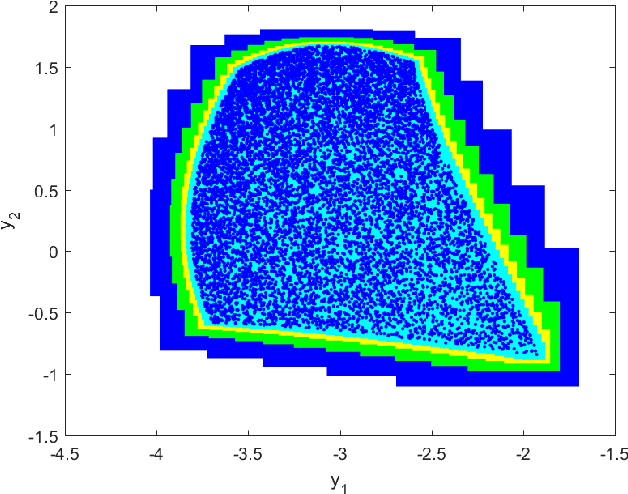
In this paper, the output reachable estimation and safety verification problems for multi-layer perceptron neural networks are addressed. First, a conception called maximum sensitivity in introduced and, for a class of multi-layer perceptrons whose activation functions are monotonic functions, the maximum sensitivity can be computed via solving convex optimization problems. Then, using a simulation-based method, the output reachable set estimation problem for neural networks is formulated into a chain of optimization problems. Finally, an automated safety verification is developed based on the output reachable set estimation result. An application to the safety verification for a robotic arm model with two joints is presented to show the effectiveness of proposed approaches.