 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing Object-based Perception and Control by Free-Energy Principle
Paper and Code
Mar 04, 2019
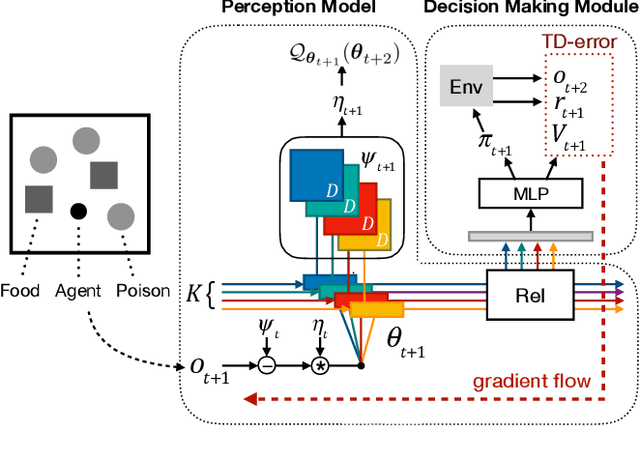


One of the well-known formulations of human perception is a hierarchical inference model based on the interaction between conceptual knowledge and sensory stimuli from the partially observable environment. This model helps human to learn inductive biases and guides their behaviors by minimizing their surprise of observations. However, most model-based reinforcement learning still lacks the support of object-based physical reasoning. In this paper, we propose Object-based Perception Control (OPC). It combines the learning of perceiving objects from the scene and that of control of the objects in the perceived environments by the free-energy principle. Extensive experiments on high-dimensional pixel environments show that OPC outperforms several strong baselines in accumulated rewards and the quality of perceptual grouping.