Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal tool path planning for 3D printing with spatio-temporal and thermal constraints
Paper and Code
Jul 19, 2020
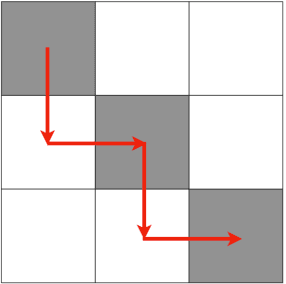
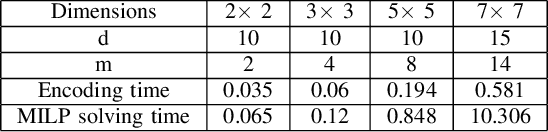
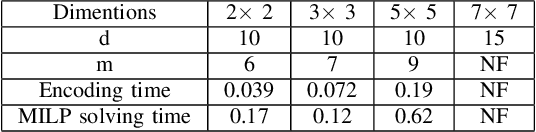
In this paper, we address the problem of synthesizing optimal path plans in a 2D subject to spatio-temporal and thermal constraints. Our solution consists of reducing the path planning problem to a Mixed Integer Linear Programming (MILP) problem. The challenge is in encoding the implication constraints in the path planning problem using only conjunctions that are permitted by the MILP formulation. Our experimental analysis using an implementation of the encoding in a Python toolbox demonstrates the feasibility of our approach in generating the optimal plans.
* Accepted at ICC 2019
View paper on