 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Mixture Weights for Off-Policy Evaluation with Multiple Behavior Policies
Paper and Code
Nov 29, 2020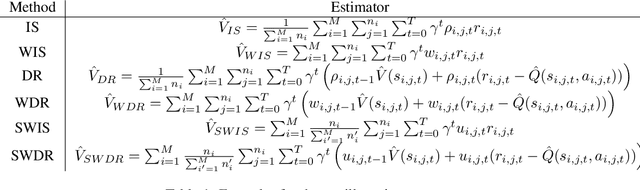

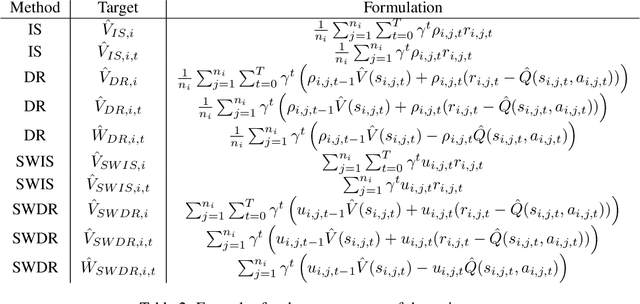
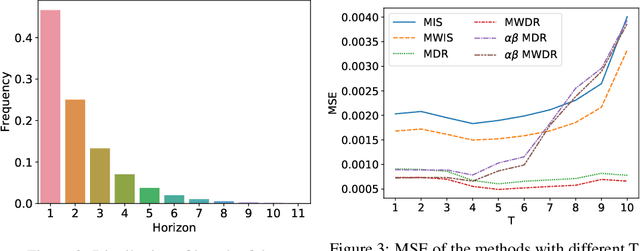
Off-policy evaluation is a key component of reinforcement learning which evaluates a target policy with offline data collected from behavior policies. It is a crucial step towards safe reinforcement learning and has been used in advertisement, recommender systems and many other applications. In these applications, sometimes the offline data is collected from multiple behavior policies. Previous works regard data from different behavior policies equally. Nevertheless, some behavior policies are better at producing good estimators while others are not. This paper starts with discussing how to correctly mix estimators produced by different behavior policies. We propose three ways to reduce the variance of the mixture estimator when all sub-estimators are unbiased or asymptotically unbiased. Furthermore, experiments on simulated recommender systems show that our methods are effective in reducing the Mean-Square Error of estimation.