 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Competitive-Ratio Control
Paper and Code
Jun 03, 2022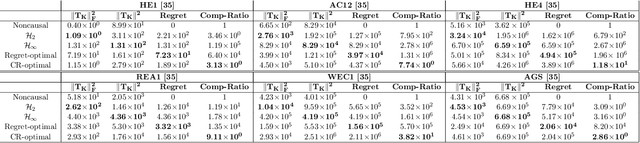
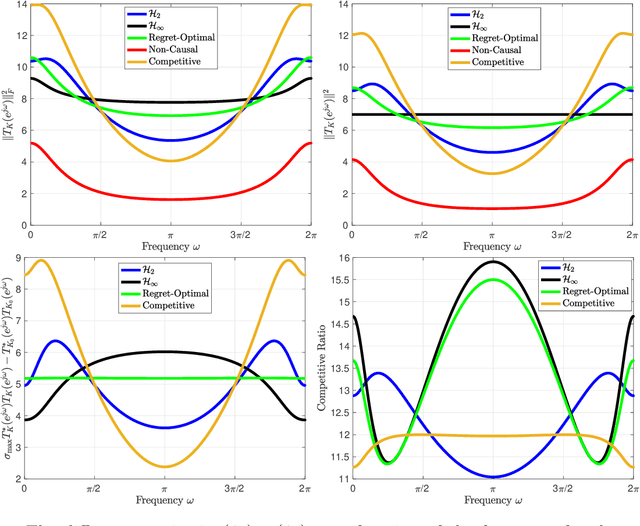

Inspired by competitive policy designs approaches in online learning, new control paradigms such as competitive-ratio and regret-optimal control have been recently proposed as alternatives to the classical $\mathcal{H}_2$ and $\mathcal{H}_\infty$ approaches. These competitive metrics compare the control cost of the designed controller against the cost of a clairvoyant controller, which has access to past, present, and future disturbances in terms of ratio and difference, respectively. While prior work provided the optimal solution for the regret-optimal control problem, in competitive-ratio control, the solution is only provided for the sub-optimal problem. In this work, we derive the optimal solution to the competitive-ratio control problem. We show that the optimal competitive ratio formula can be computed as the maximal eigenvalue of a simple matrix, and provide a state-space controller that achieves the optimal competitive ratio. We conduct an extensive numerical study to verify this analytical solution, and demonstrate that the optimal competitive-ratio controller outperforms other controllers on several large scale practical systems. The key techniques that underpin our explicit solution is a reduction of the control problem to a Nehari problem, along with a novel factorization of the clairvoyant controller's cost. We reveal an interesting relation between the explicit solutions that now exist for both competitive control paradigms by formulating a regret-optimal control framework with weight functions that can also be utilized for practical purposes.