 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal and Stable Multi-Layer Object Rearrangement on a Tabletop
Paper and Code
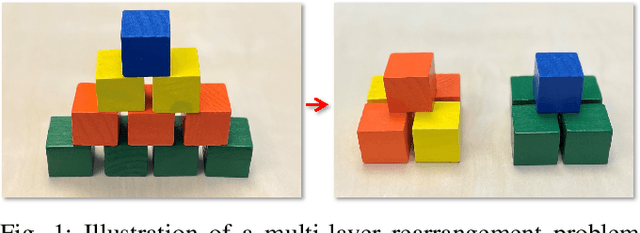
Object rearrangement is a fundamental sub-task in accomplishing a great many physical tasks. As such, effectively executing rearrangement is an important skill for intelligent robots to master. In this study, we conduct the first algorithmic study on optimally solving the problem of Multi-layer Object Rearrangement on a Tabletop (MORT), in which one object may be relocated at a time, and an object can only be moved if other objects do not block its top surface. In addition, any intermediate structure during the reconfiguration process must be physically stable, i.e., it should stand without external support. To tackle the dual challenges of untangling the dependencies between objects and ensuring structural stability, we develop an algorithm that interleaves the computation of the optimal rearrangement plan and structural stability checking. Using a carefully constructed integer linear programming (ILP) model, our algorithm, Stability-aware Integer Programming-based Planner (SIPP), readily scales to optimally solve complex rearrangement problems of 3D structures with over 60 building blocks, with solution quality significantly outperforming natural greedy best-first approaches. Upon the publication of the manuscript, source code and data will be available at https://github.com/arc-l/mort/