 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal and Bounded Suboptimal Any-Angle Multi-agent Pathfinding
Paper and Code
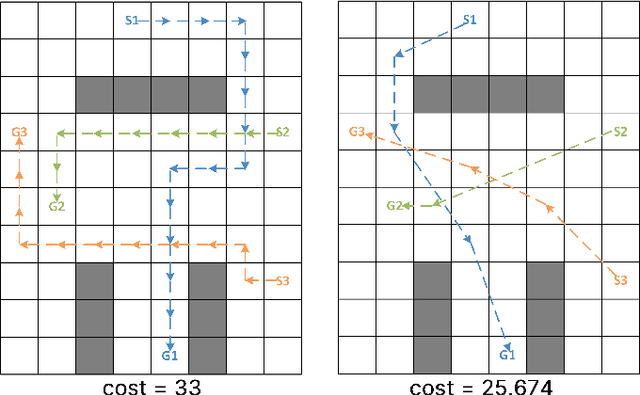
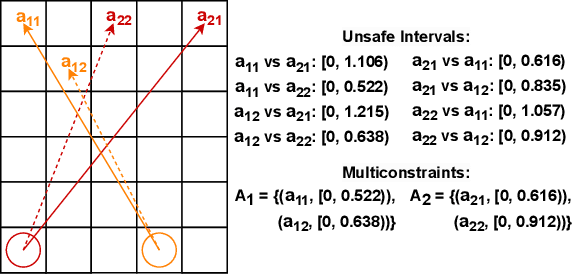
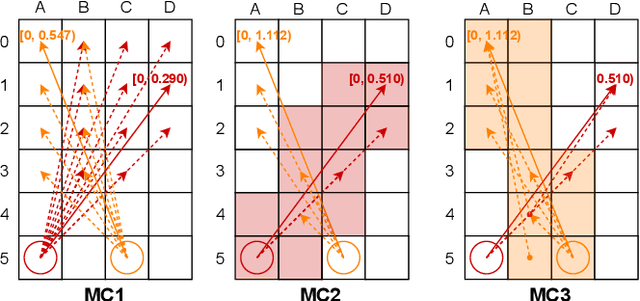
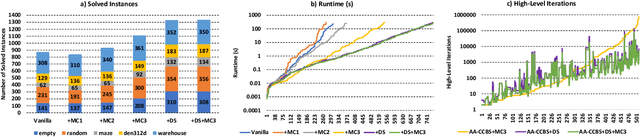
Multi-agent pathfinding (MAPF) is the problem of finding a set of conflict-free paths for a set of agents. Typically, the agents' moves are limited to a pre-defined graph of possible locations and allowed transitions between them, e.g. a 4-neighborhood grid. We explore how to solve MAPF problems when each agent can move between any pair of possible locations as long as traversing the line segment connecting them does not lead to the collision with the obstacles. This is known as any-angle pathfinding. We present the first optimal any-angle multi-agent pathfinding algorithm. Our planner is based on the Continuous Conflict-based Search (CCBS) algorithm and an optimal any-angle variant of the Safe Interval Path Planning (TO-AA-SIPP). The straightforward combination of those, however, scales poorly since any-angle path finding induces search trees with a very large branching factor. To mitigate this, we adapt two techniques from classical MAPF to the any-angle setting, namely Disjoint Splitting and Multi-Constraints. Experimental results on different combinations of these techniques show they enable solving over 30% more problems than the vanilla combination of CCBS and TO-AA-SIPP. In addition, we present a bounded-suboptimal variant of our algorithm, that enables trading runtime for solution cost in a controlled manner.