Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenVSLAM: A Versatile Visual SLAM Framework
Paper and Code
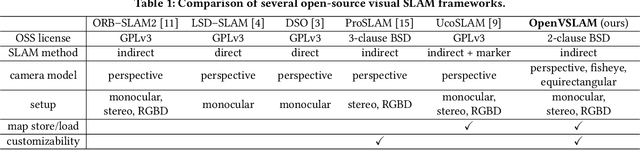
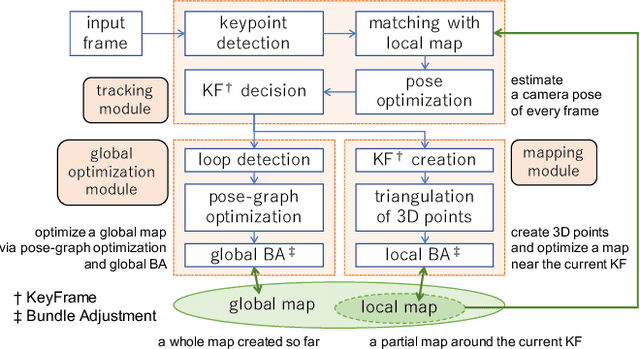
In this paper, we introduce OpenVSLAM, a visual SLAM framework with high usability and extensibility. Visual SLAM systems are essential for AR devices, autonomous control of robots and drones, etc. However, conventional open-source visual SLAM frameworks are not appropriately designed as libraries called from third-party programs. To overcome this situation, we have developed a novel visual SLAM framework. This software is designed to be easily used and extended. It incorporates several useful features and functions for research and development. OpenVSLAM is released at https://github.com/xdspacelab/openvslam under the 2-clause BSD license.
* Accepted to ACM Multimedia 2019 Open Source Software Competition.
Video: https://www.youtube.com/watch?v=Ro_s3Lbx5ms
View paper on