 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenBench: A New Benchmark and Baseline for Semantic Navigation in Smart Logistics
Paper and Code

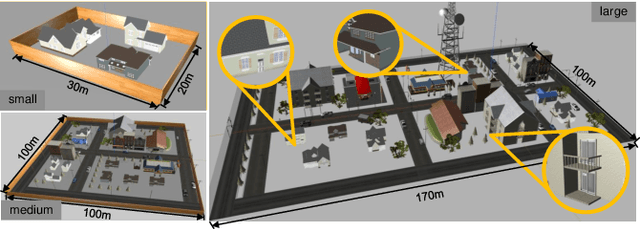

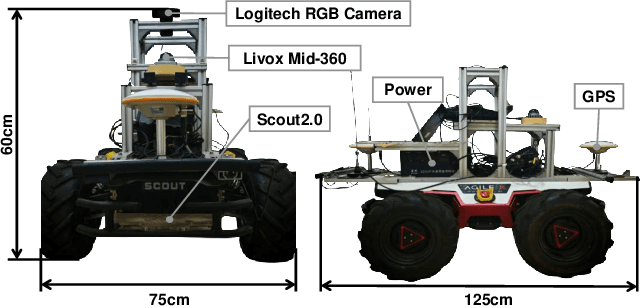
The increasing demand for efficient last-mile delivery in smart logistics underscores the role of autonomous robots in enhancing operational efficiency and reducing costs. Traditional navigation methods, which depend on high-precision maps, are resource-intensive, while learning-based approaches often struggle with generalization in real-world scenarios. To address these challenges, this work proposes the Openstreetmap-enhanced oPen-air sEmantic Navigation (OPEN) system that combines foundation models with classic algorithms for scalable outdoor navigation. The system uses off-the-shelf OpenStreetMap (OSM) for flexible map representation, thereby eliminating the need for extensive pre-mapping efforts. It also employs Large Language Models (LLMs) to comprehend delivery instructions and Vision-Language Models (VLMs) for global localization, map updates, and house number recognition. To compensate the limitations of existing benchmarks that are inadequate for assessing last-mile delivery, this work introduces a new benchmark specifically designed for outdoor navigation in residential areas, reflecting the real-world challenges faced by autonomous delivery systems. Extensive experiments in simulated and real-world environments demonstrate the proposed system's efficacy in enhancing navigation efficiency and reliability. To facilitate further research, our code and benchmark are publicly available.