 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen-Sourced Reinforcement Learning Environments for Surgical Robotics
Paper and Code
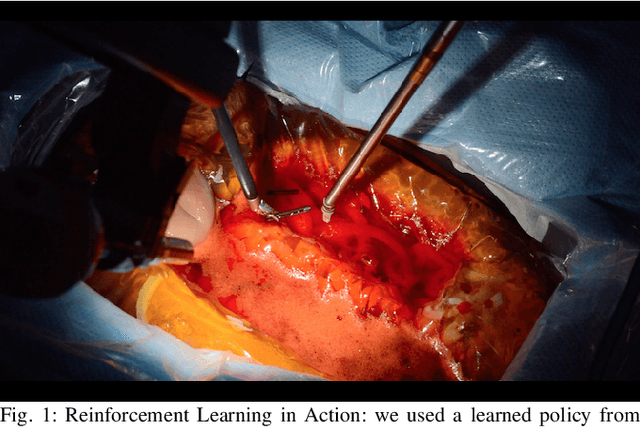
Reinforcement Learning (RL) is a machine learning framework for artificially intelligent systems to solve a variety of complex problems. Recent years has seen a surge of successes solving challenging games and smaller domain problems, including simple though non-specific robotic manipulation and grasping tasks. Rapid successes in RL have come in part due to the strong collaborative effort by the RL community to work on common, open-sourced environment simulators such as OpenAI's Gym that allow for expedited development and valid comparisons between different, state-of-art strategies. In this paper, we aim to bridge the RL and the surgical robotics communities by presenting the first open-sourced reinforcement learning environments for surgical robotics, called dVRL. Through the proposed RL environment, which are functionally equivalent to Gym, we show that it is easy to prototype and implement state-of-art RL algorithms on surgical robotics problems that aim to introduce autonomous robotic precision and accuracy to assisting, collaborative, or repetitive tasks during surgery. Learned policies are furthermore successfully transferable to a real robot. Finally, combining dVRL with the over 40+ international network of da Vinci Surgical Research Kits in active use at academic institutions, we see dVRL as enabling the broad surgical robotics community to fully leverage the newest strategies in reinforcement learning, and for reinforcement learning scientists with no knowledge of surgical robotics to test and develop new algorithms that can solve the real-world, high-impact challenges in autonomous surgery.