 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen-Source LiDAR Time Synchronization System by Mimicking GPS-clock
Paper and Code
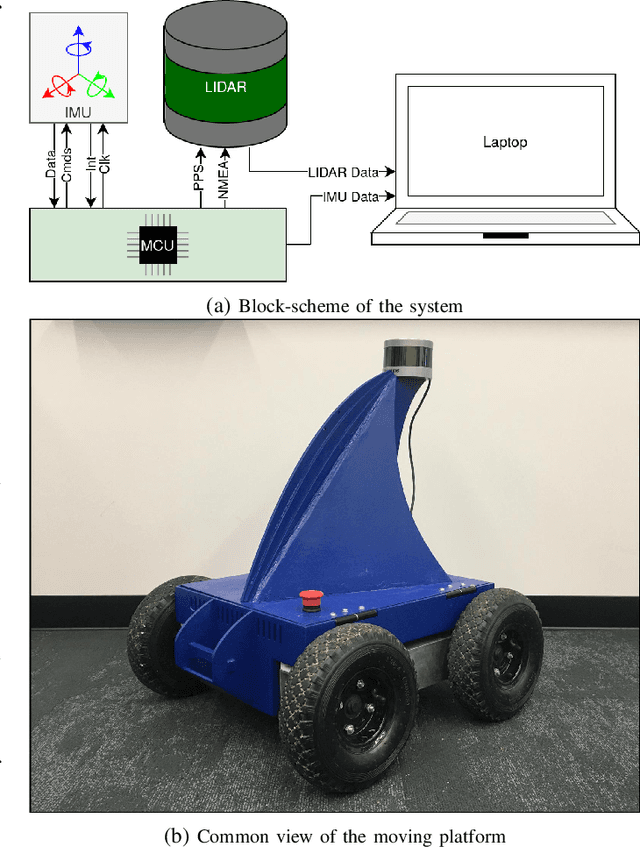


Time synchronization of multiple sensors is one of the main issues when building sensor networks. Data fusion algorithms and their applications, such as LiDAR-IMU Odometry (LIO), rely on precise timestamping. We introduce open-source LiDAR to inertial measurement unit (IMU) hardware time synchronization system, which could be generalized to multiple sensors such as cameras, encoders, other LiDARs, etc. The system mimics a GPS-supplied clock interface by a microcontroller-powered platform and provides 1 microsecond synchronization precision. In addition, we conduct an evaluation of the system precision comparing to other synchronization methods, including timestamping provided by ROS software and LiDAR inner clock, showing clear advantages over both baseline methods.