 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOPD: Single-view 3D Openable Part Detection
Paper and Code
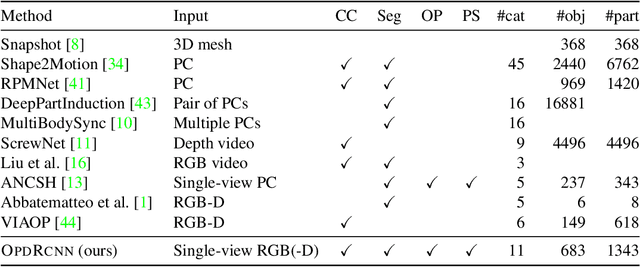
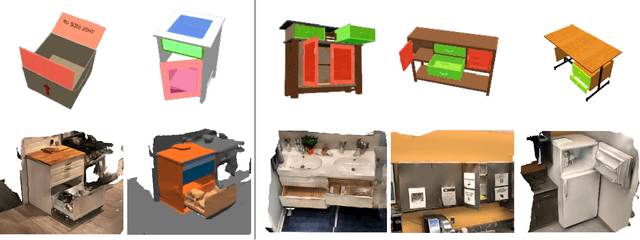
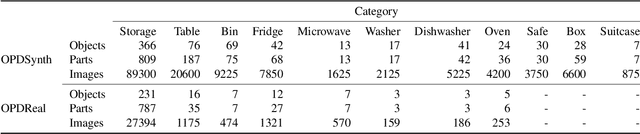
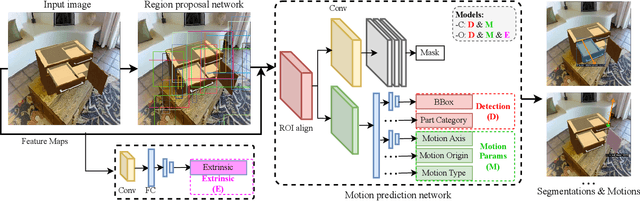
We address the task of predicting what parts of an object can open and how they move when they do so. The input is a single image of an object, and as output we detect what parts of the object can open, and the motion parameters describing the articulation of each openable part. To tackle this task, we create two datasets of 3D objects: OPDSynth based on existing synthetic objects, and OPDReal based on RGBD reconstructions of real objects. We then design OPDRCNN, a neural architecture that detects openable parts and predicts their motion parameters. Our experiments show that this is a challenging task especially when considering generalization across object categories, and the limited amount of information in a single image. Our architecture outperforms baselines and prior work especially for RGB image inputs. Short video summary at https://www.youtube.com/watch?v=P85iCaD0rfc