 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline non-convex optimization with imperfect feedback
Paper and Code
Oct 16, 2020
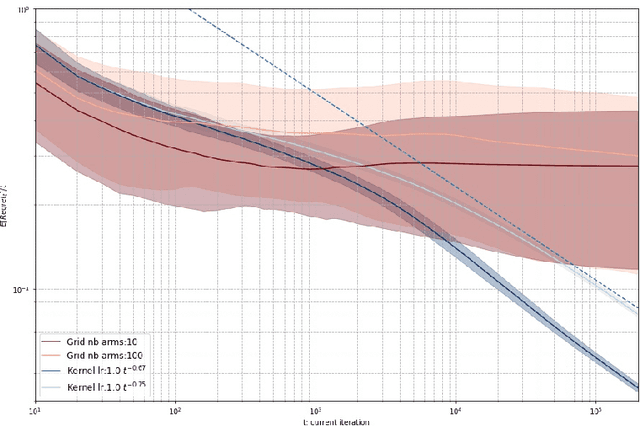
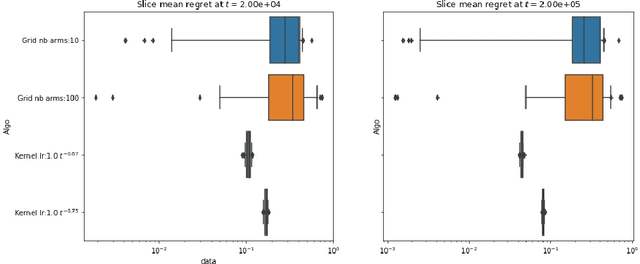
We consider the problem of online learning with non-convex losses. In terms of feedback, we assume that the learner observes - or otherwise constructs - an inexact model for the loss function encountered at each stage, and we propose a mixed-strategy learning policy based on dual averaging. In this general context, we derive a series of tight regret minimization guarantees, both for the learner's static (external) regret, as well as the regret incurred against the best dynamic policy in hindsight. Subsequently, we apply this general template to the case where the learner only has access to the actual loss incurred at each stage of the process. This is achieved by means of a kernel-based estimator which generates an inexact model for each round's loss function using only the learner's realized losses as input.