 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOne-Step Time-Dependent Future Video Frame Prediction with a Convolutional Encoder-Decoder Neural Network
Paper and Code
Jul 24, 2017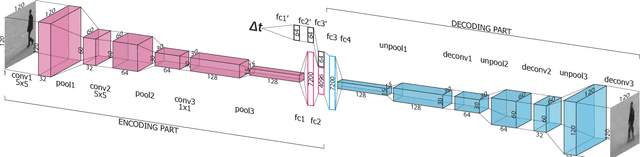
There is an inherent need for autonomous cars, drones, and other robots to have a notion of how their environment behaves and to anticipate changes in the near future. In this work, we focus on anticipating future appearance given the current frame of a video. Existing work focuses on either predicting the future appearance as the next frame of a video, or predicting future motion as optical flow or motion trajectories starting from a single video frame. This work stretches the ability of CNNs (Convolutional Neural Networks) to predict an anticipation of appearance at an arbitrarily given future time, not necessarily the next video frame. We condition our predicted future appearance on a continuous time variable that allows us to anticipate future frames at a given temporal distance, directly from the input video frame. We show that CNNs can learn an intrinsic representation of typical appearance changes over time and successfully generate realistic predictions at a deliberate time difference in the near future.