 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOne-Shot Informed Robotic Visual Search in the Wild
Paper and Code
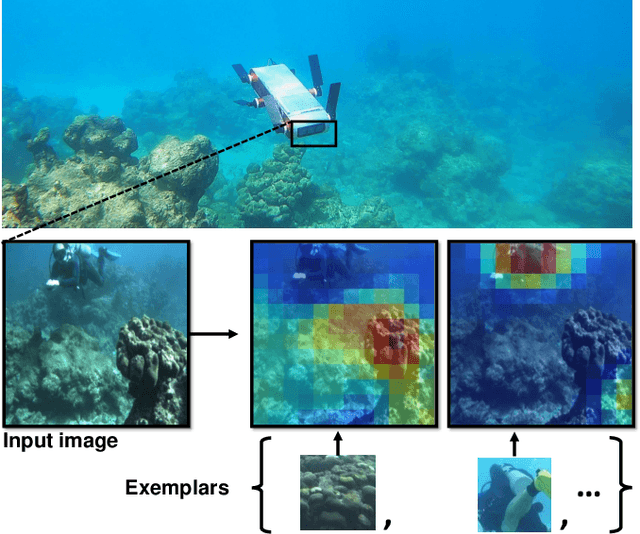
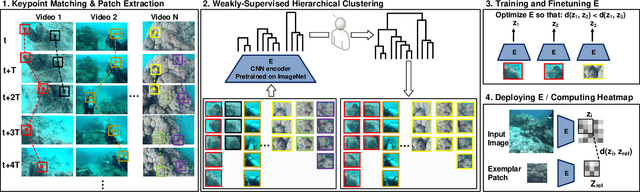
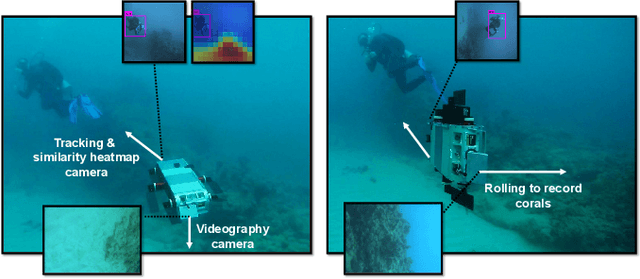
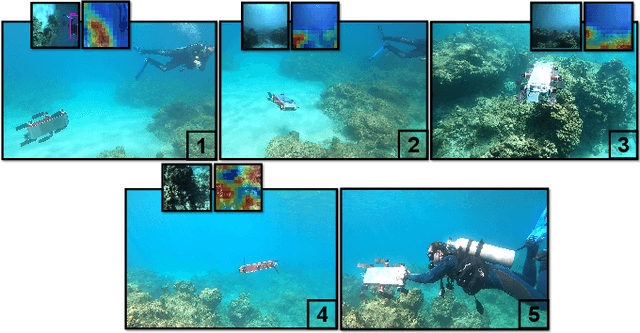
We consider the task of underwater robot navigation for the purpose of collecting scientifically-relevant video data for environmental monitoring. The majority of field robots that currently perform monitoring tasks in unstructured natural environments navigate via path-tracking a pre-specified sequence of waypoints. Although this navigation method is often necessary, it is limiting because the robot does not have a model of what the scientist deems to be relevant visual observations. Thus, the robot can neither visually search for particular types of objects, nor focus its attention on parts of the scene that might be more relevant than the pre-specified waypoints and viewpoints. In this paper we propose a method that enables informed visual navigation via a learned visual similarity operator that guides the robot's visual search towards parts of the scene that look like an exemplar image, which is given by the user as a high-level specification for data collection. We propose and evaluate a weakly-supervised video representation learning method that outperforms ImageNet embeddings for similarity tasks in the underwater domain. We also demonstrate the deployment of this similarity operator during informed visual navigation in collaborative environmental monitoring scenarios, in large-scale field trials, where the robot and a human scientist jointly search for relevant visual content.