Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Hardware Feasibility of Nonlinear Trajectory Optimization for Legged Locomotion based on a Simplified Dynamics
Paper and Code
Oct 15, 2019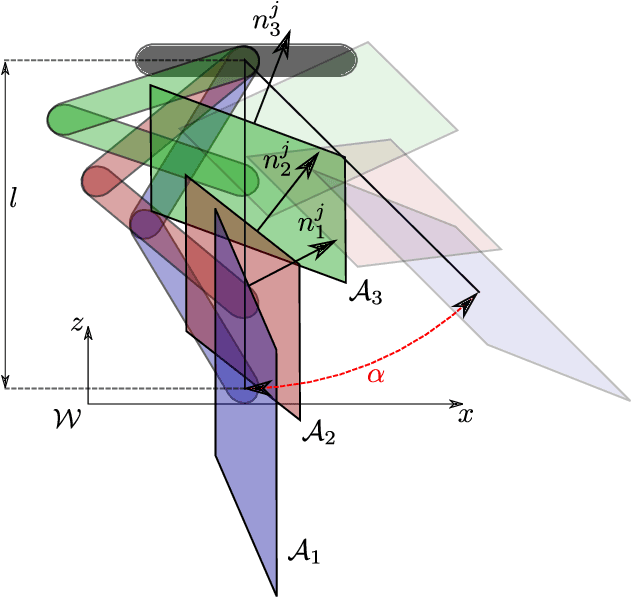
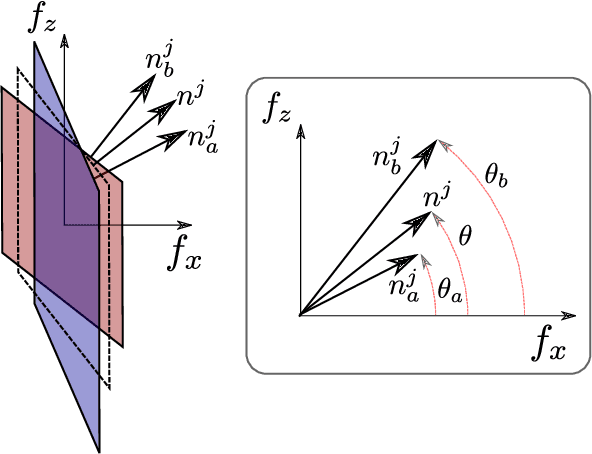
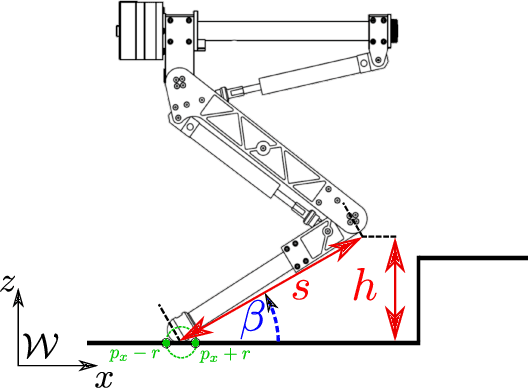
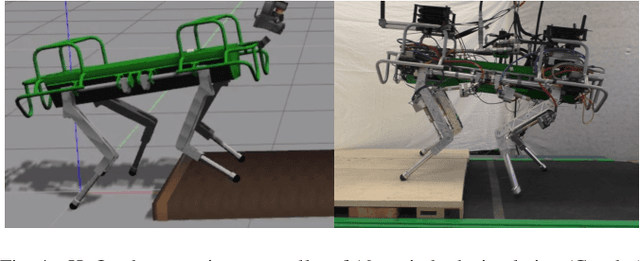
We propose two feasibility constraints to be included in a Single Rigid Body Dynamics-based trajectory optimizer in order to obtain robust motions for quadruped robots in challenging terrain. The former finds an approximate relationship between joint-torque limits and admissible contact forces without requiring the knowledge of the joints' configuration. The latter proposes a model of the leg to guarantee the avoidance of the collision with the environment. Such constraints have been included in a nonlinear non-convex optimization problem. We validate the feasibility of the trajectories both in simulation and on the HyQ robot, including experiments with non flat terrain.
View paper on