Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn-The-Go Robot-to-Human Handovers with a Mobile Manipulator
Paper and Code
Mar 16, 2022
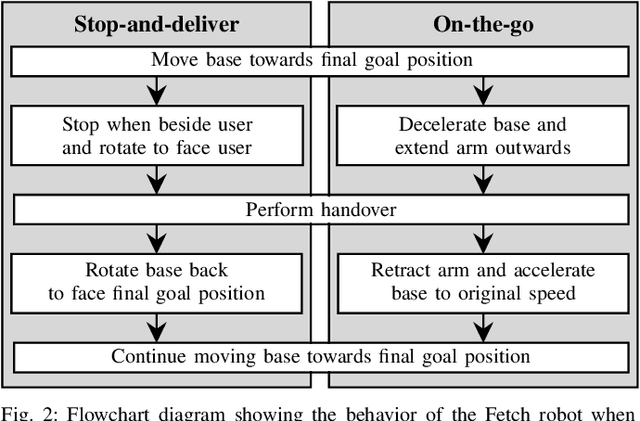
Existing approaches to direct robot-to-human handovers are typically implemented on fixed-base robot arms, or on mobile manipulators that come to a full stop before performing the handover. We propose "on-the-go" handovers which permit a moving mobile manipulator to hand over an object to a human without stopping. The on-the-go handover motion is generated with a reactive controller that allows simultaneous control of the base and the arm. In a user study, human receivers subjectively assessed on-the-go handovers to be more efficient, predictable, natural, better timed and safer than handovers that implemented a "stop-and-deliver" behavior.
* 6 pages, 7 figures, 2 tables, submitted to RO-MAN 2022
View paper on