 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOff The Beaten Sidewalk: Pedestrian Prediction In Shared Spaces For Autonomous Vehicles
Paper and Code
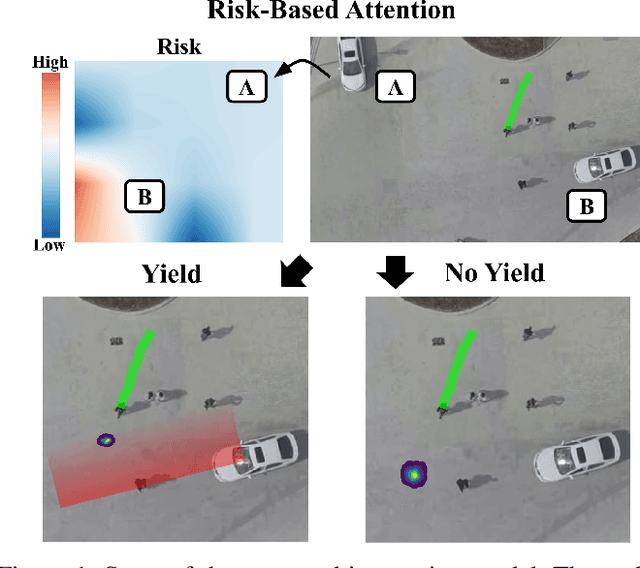

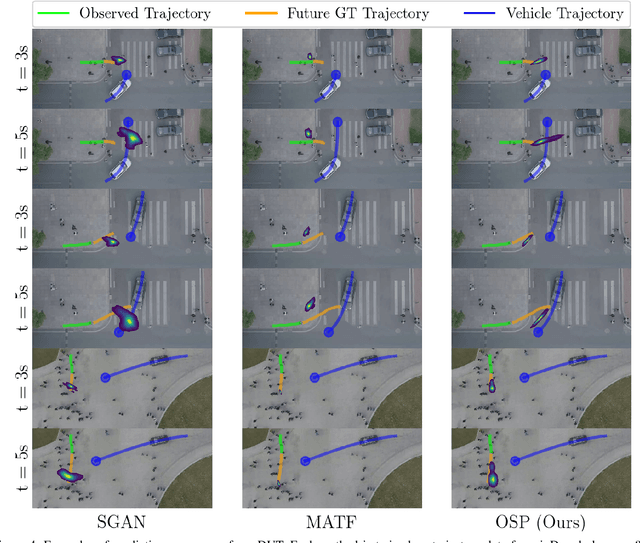
Pedestrians and drivers interact closely in a wide range of environments. Autonomous vehicles (AVs) correspondingly face the need to predict pedestrians' future trajectories in these same environments. Traditional model-based prediction methods have been limited to making predictions in highly structured scenes with signalized intersections, marked crosswalks, or curbs. Deep learning methods have instead leveraged datasets to learn predictive features that generalize across scenes, at the cost of model interpretability. This paper aims to achieve both widely applicable and interpretable predictions by proposing a risk-based attention mechanism to learn when pedestrians yield, and a model of vehicle influence to learn how yielding affects motion. A novel probabilistic method, Off the Sidewalk Predictions (OSP), uses these to achieve accurate predictions in both shared spaces and traditional scenes. Experiments on urban datasets demonstrate that the realtime method achieves state-of-the-art performance.