 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeODIP: Towards Automatic Adaptation for Object Detection by Interactive Perception
Paper and Code
Aug 03, 2021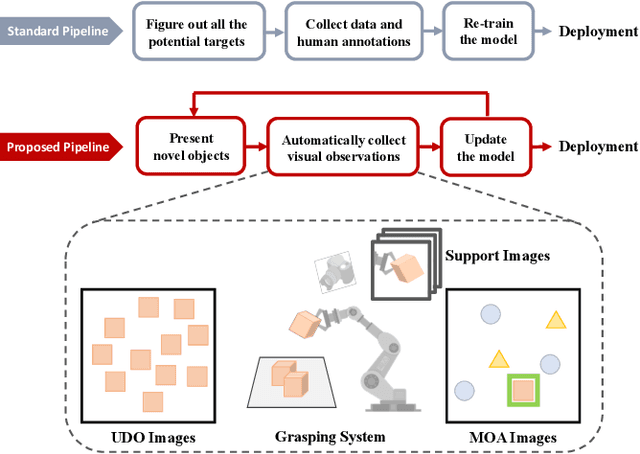
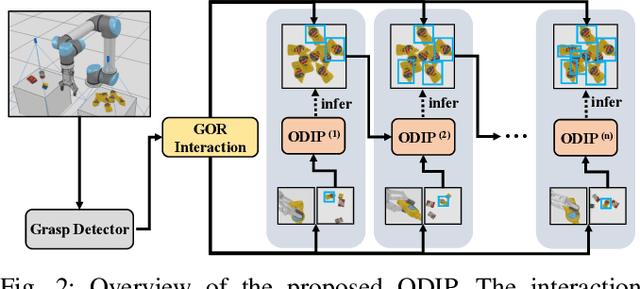
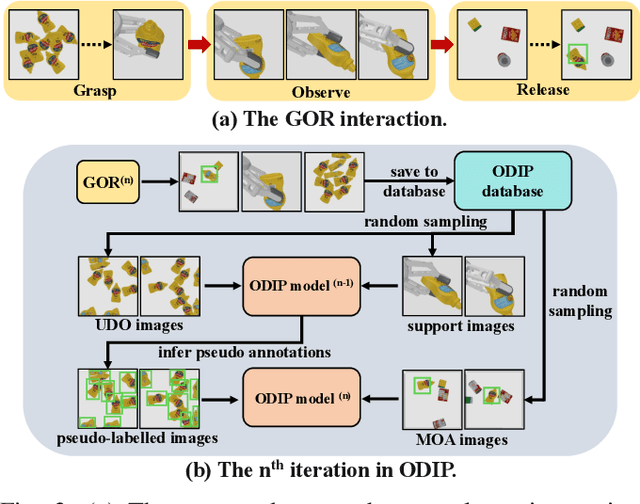
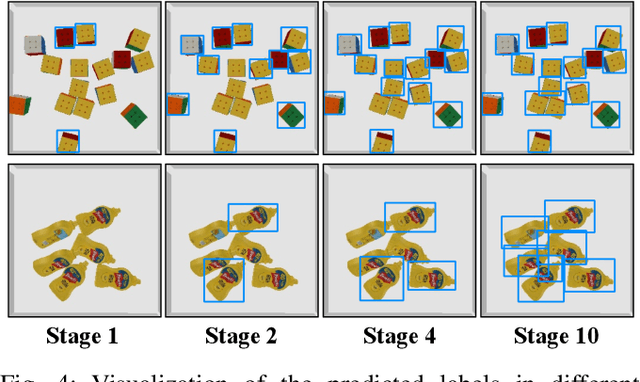
Object detection plays a deep role in visual systems by identifying instances for downstream algorithms. In industrial scenarios, however, a slight change in manufacturing systems would lead to costly data re-collection and human annotation processes to re-train models. Existing solutions such as semi-supervised and few-shot methods either rely on numerous human annotations or suffer low performance. In this work, we explore a novel object detector based on interactive perception (ODIP), which can be adapted to novel domains in an automated manner. By interacting with a grasping system, ODIP accumulates visual observations of novel objects, learning to identify previously unseen instances without human-annotated data. Extensive experiments show ODIP outperforms both the generic object detector and state-of-the-art few-shot object detector fine-tuned in traditional manners. A demo video is provided to further illustrate the idea.