 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeODE-based Learning to Optimize
Paper and Code
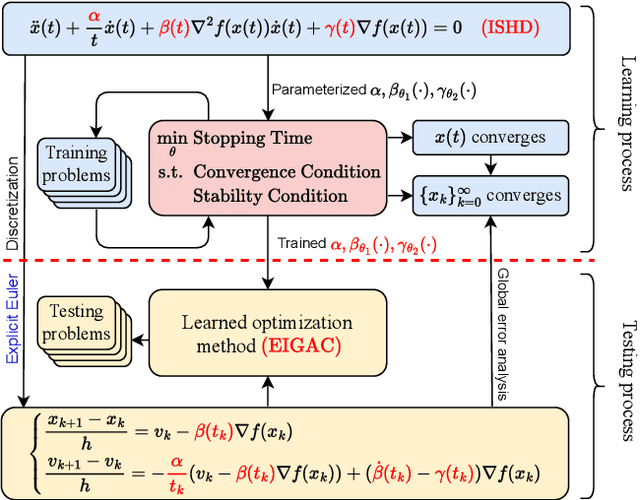

Recent years have seen a growing interest in understanding acceleration methods through the lens of ordinary differential equations (ODEs). Despite the theoretical advancements, translating the rapid convergence observed in continuous-time models to discrete-time iterative methods poses significant challenges. In this paper, we present a comprehensive framework integrating the inertial systems with Hessian-driven damping equation (ISHD) and learning-based approaches for developing optimization methods through a deep synergy of theoretical insights. We first establish the convergence condition for ensuring the convergence of the solution trajectory of ISHD. Then, we show that provided the stability condition, another relaxed requirement on the coefficients of ISHD, the sequence generated through the explicit Euler discretization of ISHD converges, which gives a large family of practical optimization methods. In order to select the best optimization method in this family for certain problems, we introduce the stopping time, the time required for an optimization method derived from ISHD to achieve a predefined level of suboptimality. Then, we formulate a novel learning to optimize (L2O) problem aimed at minimizing the stopping time subject to the convergence and stability condition. To navigate this learning problem, we present an algorithm combining stochastic optimization and the penalty method (StoPM). The convergence of StoPM using the conservative gradient is proved. Empirical validation of our framework is conducted through extensive numerical experiments across a diverse set of optimization problems. These experiments showcase the superior performance of the learned optimization methods.