 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeODE - Augmented Training Improves Anomaly Detection in Sensor Data from Machines
Paper and Code
May 05, 2016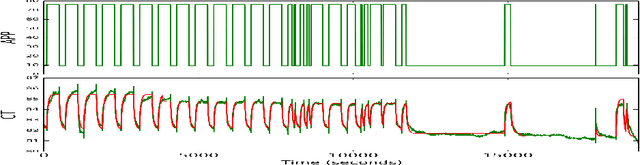
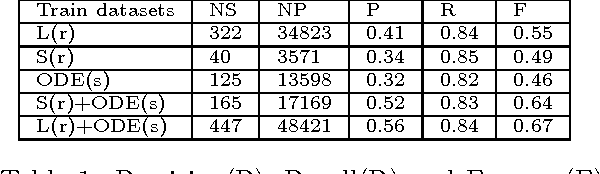
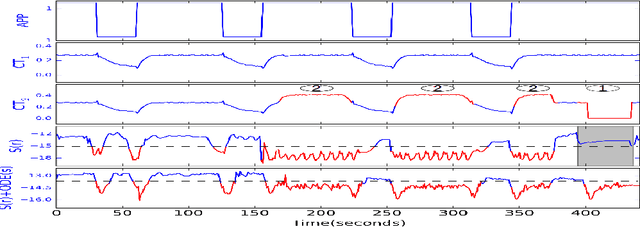

Machines of all kinds from vehicles to industrial equipment are increasingly instrumented with hundreds of sensors. Using such data to detect anomalous behaviour is critical for safety and efficient maintenance. However, anomalies occur rarely and with great variety in such systems, so there is often insufficient anomalous data to build reliable detectors. A standard approach to mitigate this problem is to use one class methods relying only on data from normal behaviour. Unfortunately, even these approaches are more likely to fail in the scenario of a dynamical system with manual control input(s). Normal behaviour in response to novel control input(s) might look very different to the learned detector which may be incorrectly detected as anomalous. In this paper, we address this issue by modelling time-series via Ordinary Differential Equations (ODE) and utilising such an ODE model to simulate the behaviour of dynamical systems under varying control inputs. The available data is then augmented with data generated from the ODE, and the anomaly detector is retrained on this augmented dataset. Experiments demonstrate that ODE-augmented training data allows better coverage of possible control input(s) and results in learning more accurate distinctions between normal and anomalous behaviour in time-series.