 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOccupancy Grid Map to Pose Graph-based Map: Robust BIM-based 2D-LiDAR Localization for Lifelong Indoor Navigation in Changing and Dynamic Environments
Paper and Code
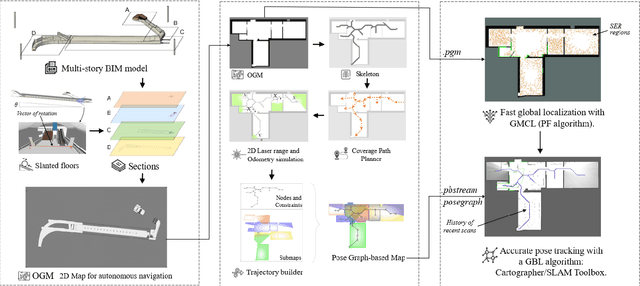


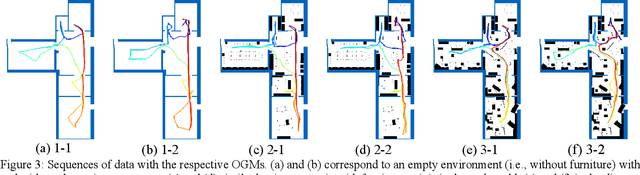
Several studies rely on the de facto standard Adaptive Monte Carlo Localization (AMCL) method to localize a robot in an Occupancy Grid Map (OGM) extracted from a building information model (BIM model). However, most of these studies assume that the BIM model precisely represents the real world, which is rarely true. Discrepancies between the reference BIM model and the real world (Scan-BIM deviations) are not only due to furniture or clutter but also the usual as-planned and as-built deviations that exist with any model created in the design phase. These deviations affect the accuracy of AMCL drastically. This paper proposes an open-source method to generate appropriate Pose Graph-based maps from BIM models for robust 2D-LiDAR localization in changing and dynamic environments. First, 2D OGMs are automatically generated from complex BIM models. These OGMs only represent structural elements allowing indoor autonomous robot navigation. Then, an efficient technique converts these 2D OGMs into Pose Graph-based maps enabling more accurate robot pose tracking. Finally, we leverage the different map representations for accurate, robust localization with a combination of state-of-the-art algorithms. Moreover, we provide a quantitative comparison of various state-of-the-art localization algorithms in three simulated scenarios with varying levels of Scan-BIM deviations and dynamic agents. More precisely, we compare two Particle Filter (PF) algorithms: AMCL and General Monte Carlo Localization (GMCL); and two Graph-based Localization (GBL) methods: Google's Cartographer and SLAM Toolbox, solving the global localization and pose tracking problems. The numerous experiments demonstrate that the proposed method contributes to a robust localization with an as-designed BIM model or a sparse OGM in changing and dynamic environments, outperforming the conventional AMCL in accuracy and robustness.