Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject Registration in Neural Fields
Paper and Code
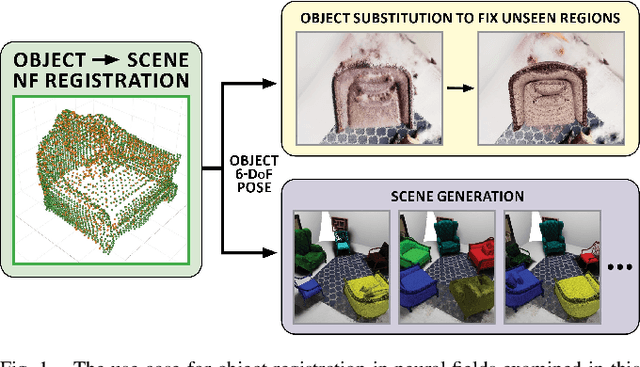
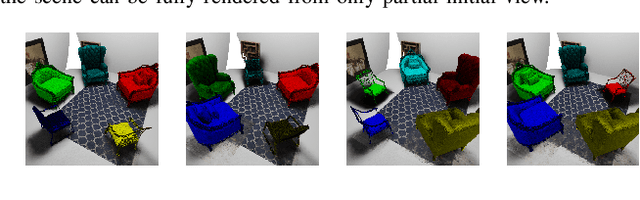
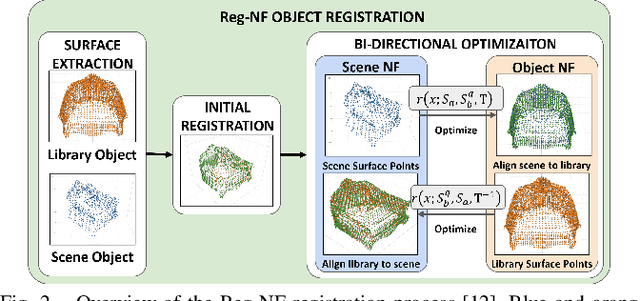
Neural fields provide a continuous scene representation of 3D geometry and appearance in a way which has great promise for robotics applications. One functionality that unlocks unique use-cases for neural fields in robotics is object 6-DoF registration. In this paper, we provide an expanded analysis of the recent Reg-NF neural field registration method and its use-cases within a robotics context. We showcase the scenario of determining the 6-DoF pose of known objects within a scene using scene and object neural field models. We show how this may be used to better represent objects within imperfectly modelled scenes and generate new scenes by substituting object neural field models into the scene.
* Accepted to ICRA 2024 RoboNeRF workshop. 5 pages, 10 figures. arXiv
admin note: substantial text overlap with arXiv:2402.09722
View paper on