 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject manipulation through contact configuration regulation: multiple and intermittent contacts
Paper and Code
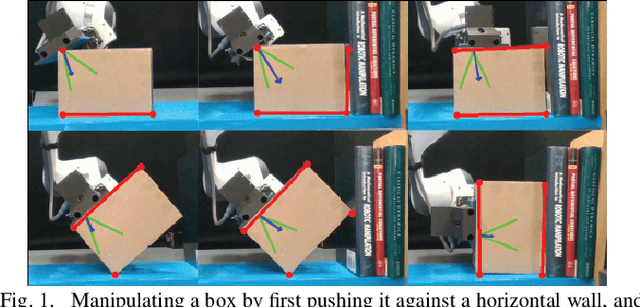
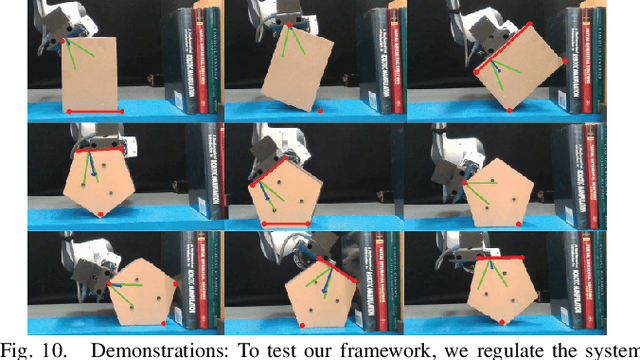
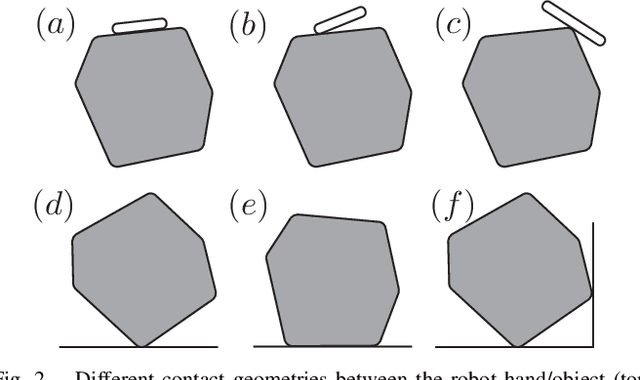
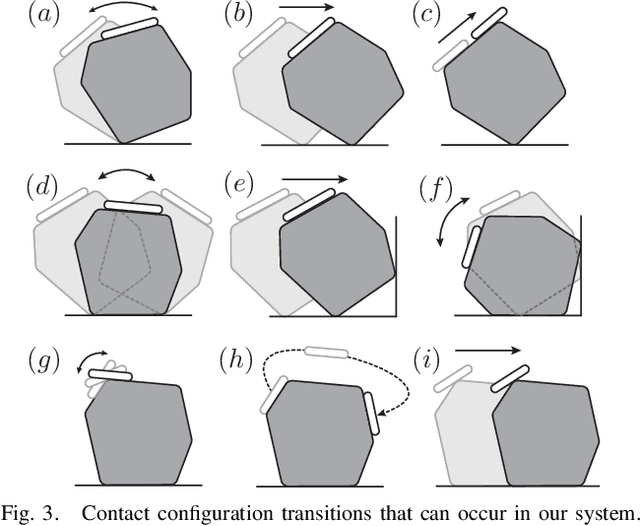
In this work, we build on our method for manipulating unknown objects via contact configuration regulation: the estimation and control of the location, geometry, and mode of all contacts between the robot, object, and environment. We further develop our estimator and controller to enable manipulation through more complex contact interactions, including intermittent contact between the robot/object, and multiple contacts between the object/environment. In addition, we support a larger set of contact geometries at each interface. This is accomplished through a factor graph based estimation framework that reasons about the complementary kinematic and wrench constraints of contact to predict the current contact configuration. We are aided by the incorporation of a limited amount of visual feedback; which when combined with the available F/T sensing and robot proprioception, allows us to differentiate contact modes that were previously indistinguishable. We implement this revamped framework on our manipulation platform, and demonstrate that it allows the robot to perform a wider set of manipulation tasks. This includes, using a wall as a support to re-orient an object, or regulating the contact geometry between the object and the ground. Finally, we conduct ablation studies to understand the contributions from visual and tactile feedback in our manipulation framework. Our code can be found at: https://github.com/mcubelab/pbal.