 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNovelty-based Generalization Evaluation for Traffic Light Detection
Paper and Code
Jan 03, 2022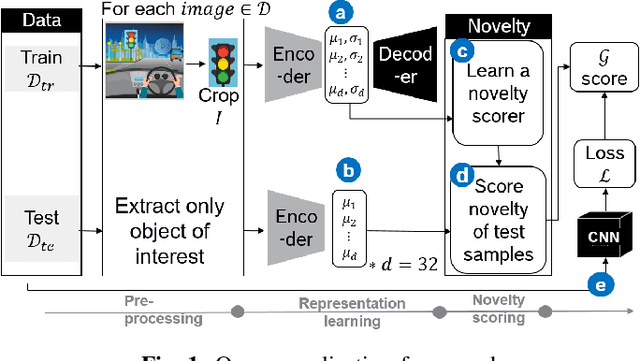
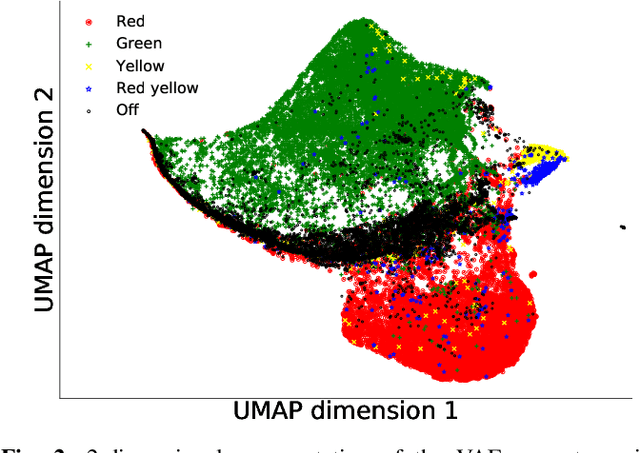
The advent of Convolutional Neural Networks (CNNs) has led to their application in several domains. One noteworthy application is the perception system for autonomous driving that relies on the predictions from CNNs. Practitioners evaluate the generalization ability of such CNNs by calculating various metrics on an independent test dataset. A test dataset is often chosen based on only one precondition, i.e., its elements are not a part of the training data. Such a dataset may contain objects that are both similar and novel w.r.t. the training dataset. Nevertheless, existing works do not reckon the novelty of the test samples and treat them all equally for evaluating generalization. Such novelty-based evaluations are of significance to validate the fitness of a CNN in autonomous driving applications. Hence, we propose a CNN generalization scoring framework that considers novelty of objects in the test dataset. We begin with the representation learning technique to reduce the image data into a low-dimensional space. It is on this space we estimate the novelty of the test samples. Finally, we calculate the generalization score as a combination of the test data prediction performance and novelty. We perform an experimental study of the same for our traffic light detection application. In addition, we systematically visualize the results for an interpretable notion of novelty.