 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNovel View Synthesis from Single Images via Point Cloud Transformation
Paper and Code
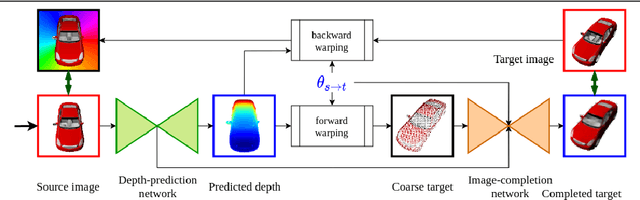
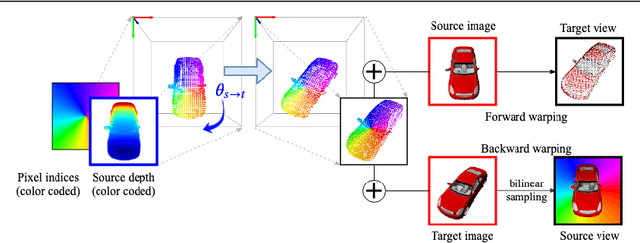
In this paper the argument is made that for true novel view synthesis of objects, where the object can be synthesized from any viewpoint, an explicit 3D shape representation isdesired. Our method estimates point clouds to capture the geometry of the object, which can be freely rotated into the desired view and then projected into a new image. This image, however, is sparse by nature and hence this coarse view is used as the input of an image completion network to obtain the dense target view. The point cloud is obtained using the predicted pixel-wise depth map, estimated from a single RGB input image,combined with the camera intrinsics. By using forward warping and backward warpingbetween the input view and the target view, the network can be trained end-to-end without supervision on depth. The benefit of using point clouds as an explicit 3D shape for novel view synthesis is experimentally validated on the 3D ShapeNet benchmark. Source code and data will be available at https://lhoangan.github.io/pc4novis/.