 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNormative Disagreement as a Challenge for Cooperative AI
Paper and Code
Nov 27, 2021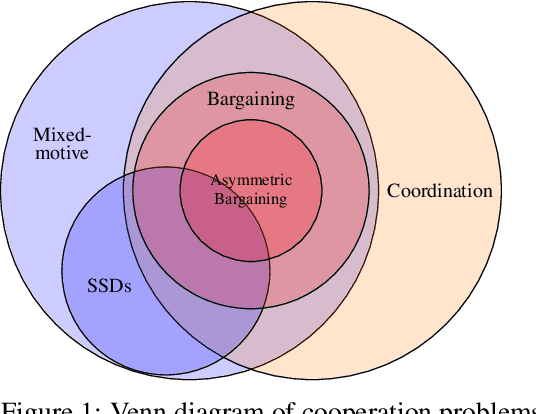



Cooperation in settings where agents have both common and conflicting interests (mixed-motive environments) has recently received considerable attention in multi-agent learning. However, the mixed-motive environments typically studied have a single cooperative outcome on which all agents can agree. Many real-world multi-agent environments are instead bargaining problems (BPs): they have several Pareto-optimal payoff profiles over which agents have conflicting preferences. We argue that typical cooperation-inducing learning algorithms fail to cooperate in BPs when there is room for normative disagreement resulting in the existence of multiple competing cooperative equilibria, and illustrate this problem empirically. To remedy the issue, we introduce the notion of norm-adaptive policies. Norm-adaptive policies are capable of behaving according to different norms in different circumstances, creating opportunities for resolving normative disagreement. We develop a class of norm-adaptive policies and show in experiments that these significantly increase cooperation. However, norm-adaptiveness cannot address residual bargaining failure arising from a fundamental tradeoff between exploitability and cooperative robustness.