 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonsmooth Implicit Differentiation for Machine Learning and Optimization
Paper and Code
Jun 08, 2021
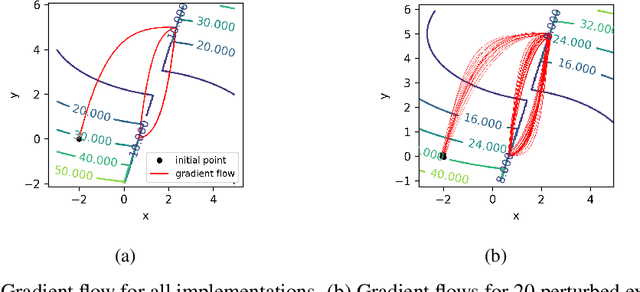
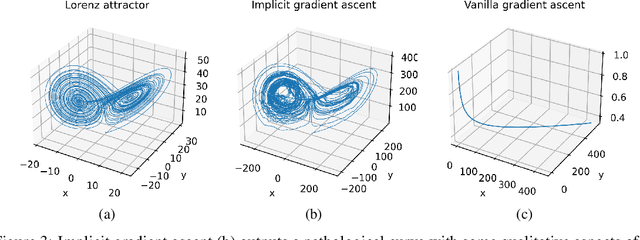

In view of training increasingly complex learning architectures, we establish a nonsmooth implicit function theorem with an operational calculus. Our result applies to most practical problems (i.e., definable problems) provided that a nonsmooth form of the classical invertibility condition is fulfilled. This approach allows for formal subdifferentiation: for instance, replacing derivatives by Clarke Jacobians in the usual differentiation formulas is fully justified for a wide class of nonsmooth problems. Moreover this calculus is entirely compatible with algorithmic differentiation (e.g., backpropagation). We provide several applications such as training deep equilibrium networks, training neural nets with conic optimization layers, or hyperparameter-tuning for nonsmooth Lasso-type models. To show the sharpness of our assumptions, we present numerical experiments showcasing the extremely pathological gradient dynamics one can encounter when applying implicit algorithmic differentiation without any hypothesis.