 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonlinear state-space identification using deep encoder networks
Paper and Code
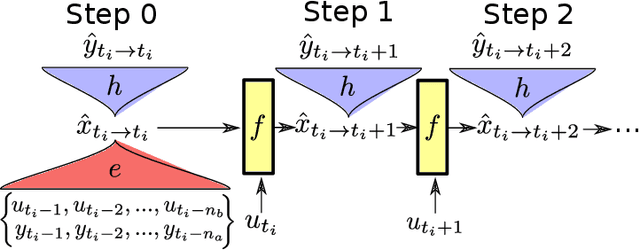
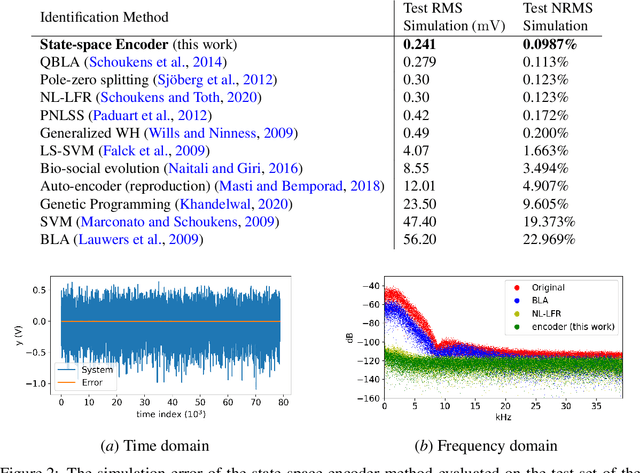
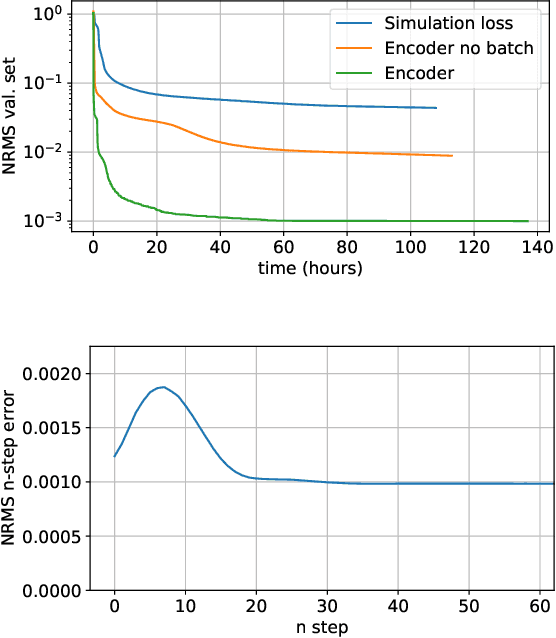
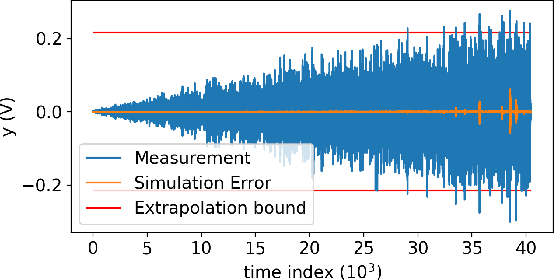
Nonlinear state-space identification for dynamical systems is most often performed by minimizing the simulation error to reduce the effect of model errors. This optimization problem becomes computationally expensive for large datasets. Moreover, the problem is also strongly non-convex, often leading to sub-optimal parameter estimates. This paper introduces a method that approximates the simulation loss by splitting the data set into multiple independent sections similar to the multiple shooting method. This splitting operation allows for the use of stochastic gradient optimization methods which scale well with data set size and has a smoothing effect on the non-convex cost function. The main contribution of this paper is the introduction of an encoder function to estimate the initial state at the start of each section. The encoder function estimates the initial states using a feed-forward neural network starting from historical input and output samples. The efficiency and performance of the proposed state-space encoder method is illustrated on two well-known benchmarks where, for instance, the method achieves the lowest known simulation error on the Wiener--Hammerstein benchmark.