 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonlinear Intensity Underwater Sonar Image Matching Method Based on Phase Information and Deep Convolution Features
Paper and Code
Nov 29, 2021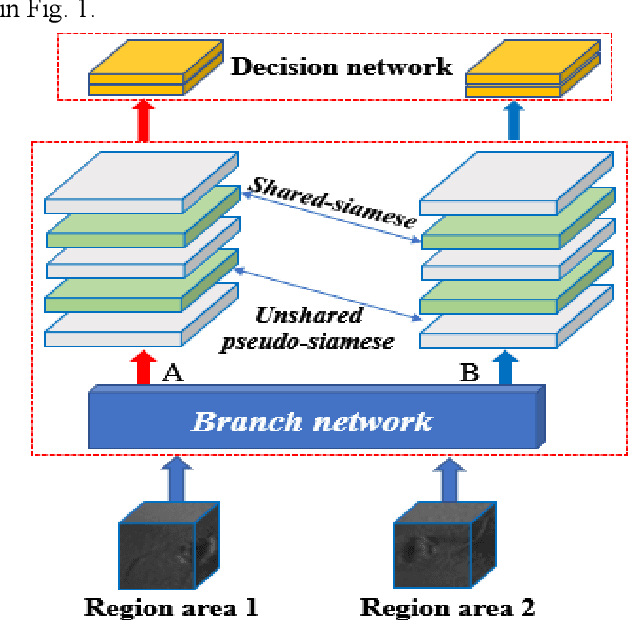
In the field of deep-sea exploration, sonar is presently the only efficient long-distance sensing device. The complicated underwater environment, such as noise interference, low target intensity or background dynamics, has brought many negative effects on sonar imaging. Among them, the problem of nonlinear intensity is extremely prevalent. It is also known as the anisotropy of acoustic sensor imaging, that is, when autonomous underwater vehicles (AUVs) carry sonar to detect the same target from different angles, the intensity variation between image pairs is sometimes very large, which makes the traditional matching algorithm almost ineffective. However, image matching is the basis of comprehensive tasks such as navigation, positioning, and mapping. Therefore, it is very valuable to obtain robust and accurate matching results. This paper proposes a combined matching method based on phase information and deep convolution features. It has two outstanding advantages: one is that the deep convolution features could be used to measure the similarity of the local and global positions of the sonar image; the other is that local feature matching could be performed at the key target position of the sonar image. This method does not need complex manual designs, and completes the matching task of nonlinear intensity sonar images in a close end-to-end manner. Feature matching experiments are carried out on the deep-sea sonar images captured by AUVs, and the results show that our proposal has preeminent matching accuracy and robustness.