 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNoise Flow: Noise Modeling with Conditional Normalizing Flows
Paper and Code
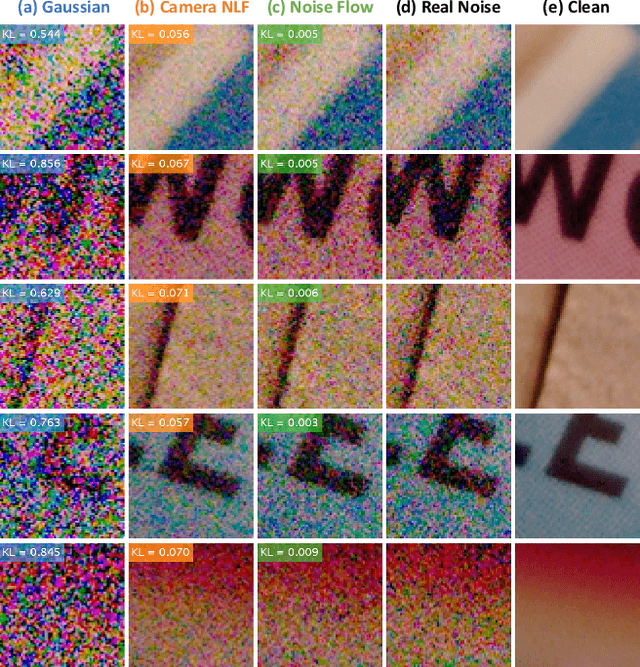


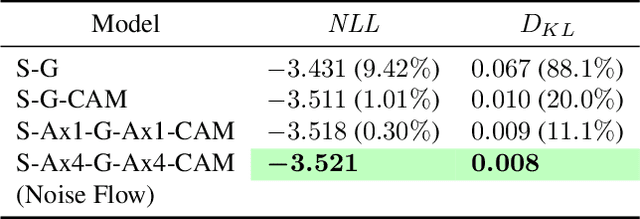
Modeling and synthesizing image noise is an important aspect in many computer vision applications. The long-standing additive white Gaussian and heteroscedastic (signal-dependent) noise models widely used in the literature provide only a coarse approximation of real sensor noise. This paper introduces Noise Flow, a powerful and accurate noise model based on recent normalizing flow architectures. Noise Flow combines well-established basic parametric noise models (e.g., signal-dependent noise) with the flexibility and expressiveness of normalizing flow networks. The result is a single, comprehensive, compact noise model containing fewer than 2500 parameters yet able to represent multiple cameras and gain factors. Noise Flow dramatically outperforms existing noise models, with 0.42 nats/pixel improvement over the camera-calibrated noise level functions, which translates to 52% improvement in the likelihood of sampled noise. Noise Flow represents the first serious attempt to go beyond simple parametric models to one that leverages the power of deep learning and data-driven noise distributions.