 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNoise Filtering Benchmark for Neuromorphic Satellites Observations
Paper and Code
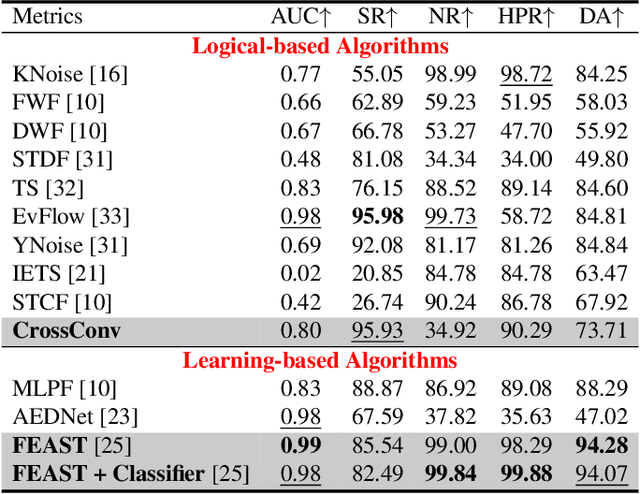
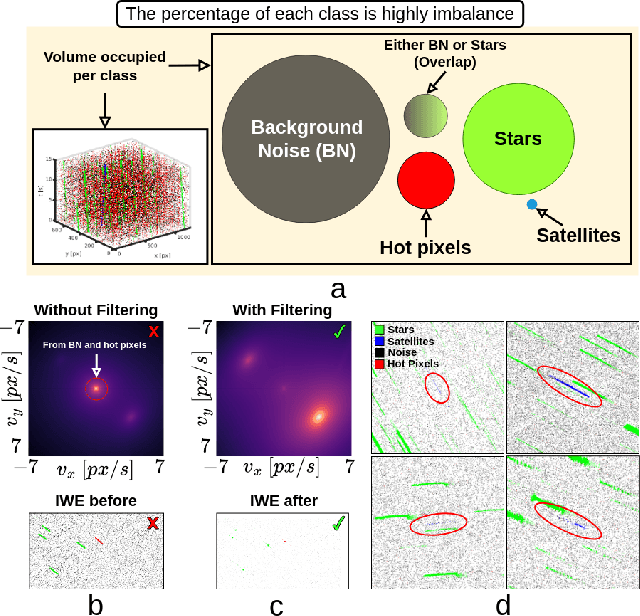
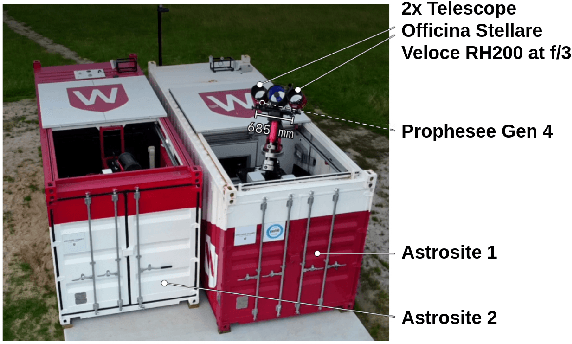
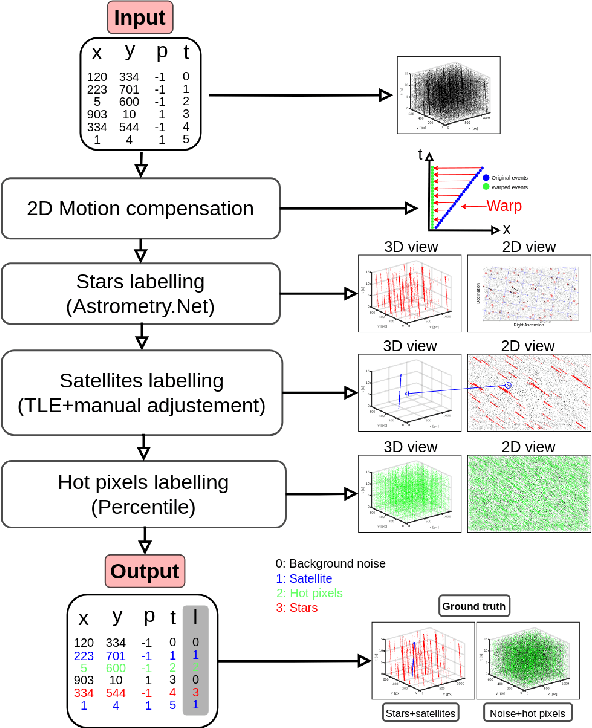
Event cameras capture sparse, asynchronous brightness changes which offer high temporal resolution, high dynamic range, low power consumption, and sparse data output. These advantages make them ideal for Space Situational Awareness, particularly in detecting resident space objects moving within a telescope's field of view. However, the output from event cameras often includes substantial background activity noise, which is known to be more prevalent in low-light conditions. This noise can overwhelm the sparse events generated by satellite signals, making detection and tracking more challenging. Existing noise-filtering algorithms struggle in these scenarios because they are typically designed for denser scenes, where losing some signal is acceptable. This limitation hinders the application of event cameras in complex, real-world environments where signals are extremely sparse. In this paper, we propose new event-driven noise-filtering algorithms specifically designed for very sparse scenes. We categorise the algorithms into logical-based and learning-based approaches and benchmark their performance against 11 state-of-the-art noise-filtering algorithms, evaluating how effectively they remove noise and hot pixels while preserving the signal. Their performance was quantified by measuring signal retention and noise removal accuracy, with results reported using ROC curves across the parameter space. Additionally, we introduce a new high-resolution satellite dataset with ground truth from a real-world platform under various noise conditions, which we have made publicly available. Code, dataset, and trained weights are available at \url{https://github.com/samiarja/dvs_sparse_filter}.