 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNext-Best-View Selection for Robot Eye-in-Hand Calibration
Paper and Code
Mar 12, 2023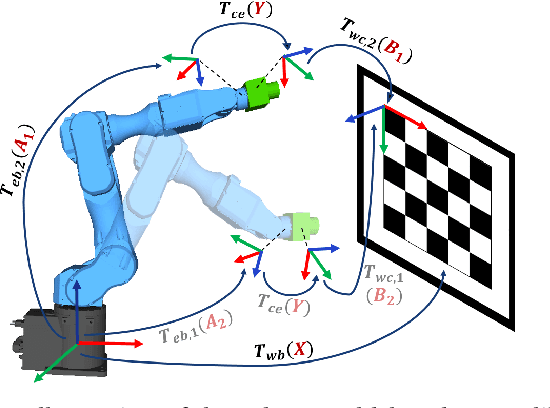
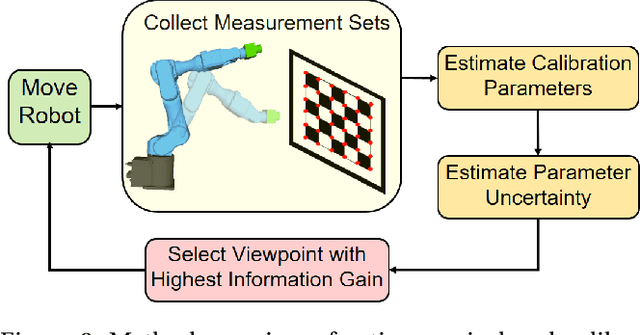
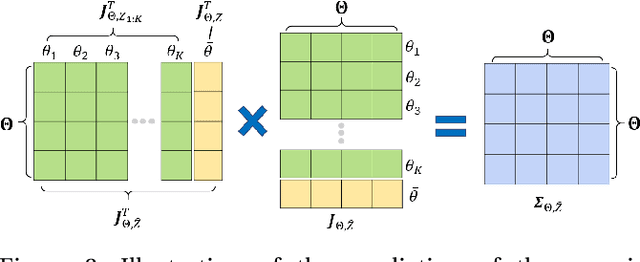
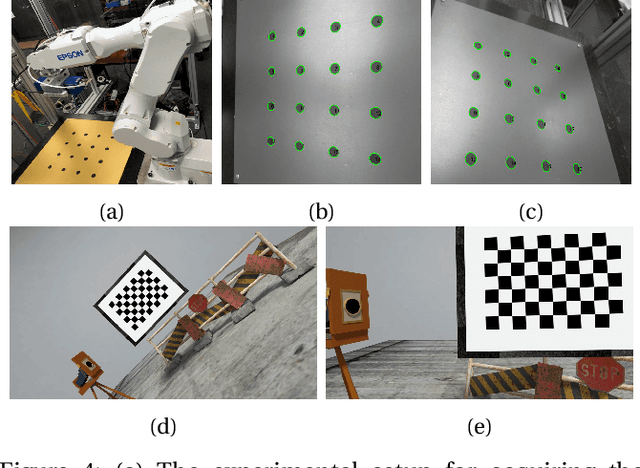
Robotic eye-in-hand calibration is the task of determining the rigid 6-DoF pose of the camera with respect to the robot end-effector frame. In this paper, we formulate this task as a non-linear optimization problem and introduce an active vision approach to strategically select the robot pose for maximizing calibration accuracy. Specifically, given an initial collection of measurement sets, our system first computes the calibration parameters and estimates the parameter uncertainties. We then predict the next robot pose from which to collect the next measurement that brings about the maximum information gain (uncertainty reduction) in the calibration parameters. We test our approach on a simulated dataset and validate the results on a real 6-axis robot manipulator. The results demonstrate that our approach can achieve accurate calibrations using many fewer viewpoints than other commonly used baseline calibration methods.