 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Stochastic Contraction Metrics for Robust Control and Estimation
Paper and Code
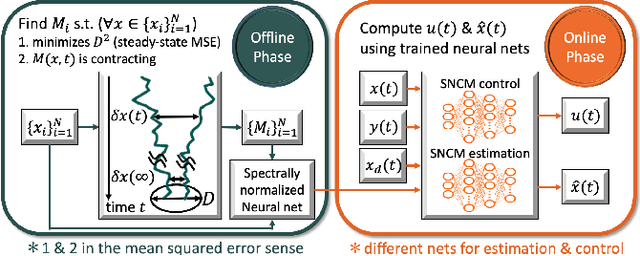
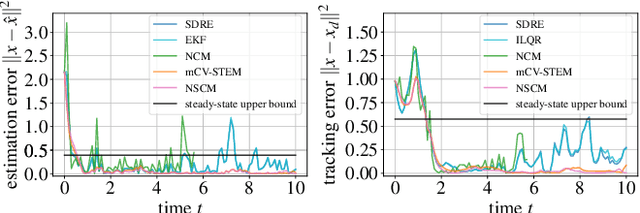
We present neural stochastic contraction metrics, a new design framework for provably-stable robust control and estimation for a class of stochastic nonlinear systems. It exploits a spectrally-normalized deep neural network to construct a contraction metric, sampled via simplified convex optimization in the stochastic setting. Spectral normalization constrains the state-derivatives of the metric to be Lipschitz continuous, and thereby ensures exponential boundedness of the mean squared distance of system trajectories under stochastic disturbances. This framework allows autonomous agents to approximate optimal stable control and estimation policies in real-time, and outperforms existing nonlinear control and estimation techniques including the state-dependent Riccati equation, iterative LQR, EKF, and deterministic neural contraction metric method, as illustrated in simulations.