 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Rendering for Stereo 3D Reconstruction of Deformable Tissues in Robotic Surgery
Paper and Code



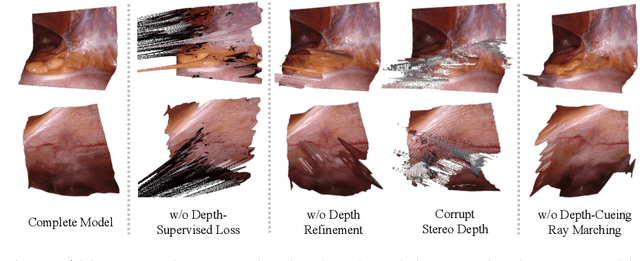
Reconstruction of the soft tissues in robotic surgery from endoscopic stereo videos is important for many applications such as intra-operative navigation and image-guided robotic surgery automation. Previous works on this task mainly rely on SLAM-based approaches, which struggle to handle complex surgical scenes. Inspired by recent progress in neural rendering, we present a novel framework for deformable tissue reconstruction from binocular captures in robotic surgery under the single-viewpoint setting. Our framework adopts dynamic neural radiance fields to represent deformable surgical scenes in MLPs and optimize shapes and deformations in a learning-based manner. In addition to non-rigid deformations, tool occlusion and poor 3D clues from a single viewpoint are also particular challenges in soft tissue reconstruction. To overcome these difficulties, we present a series of strategies of tool mask-guided ray casting, stereo depth-cueing ray marching and stereo depth-supervised optimization. With experiments on DaVinci robotic surgery videos, our method significantly outperforms the current state-of-the-art reconstruction method for handling various complex non-rigid deformations. To our best knowledge, this is the first work leveraging neural rendering for surgical scene 3D reconstruction with remarkable potential demonstrated. Code is available at: https://github.com/med-air/EndoNeRF.