 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Neural Textures Make Sim2Real Consistent
Paper and Code
Jun 27, 2022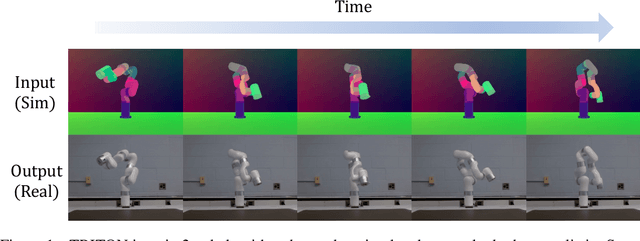
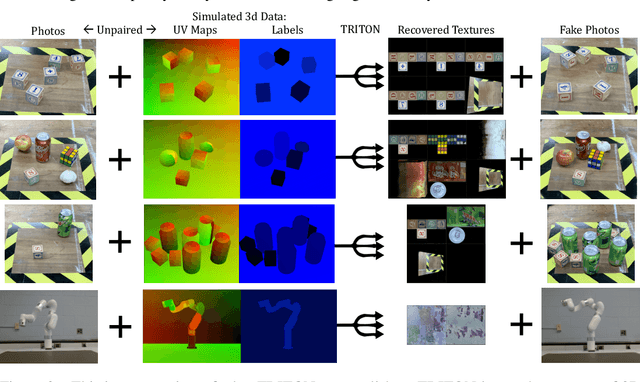

Unpaired image translation algorithms can be used for sim2real tasks, but many fail to generate temporally consistent results. We present a new approach that combines differentiable rendering with image translation to achieve temporal consistency over indefinite timescales, using surface consistency losses and \emph{neural neural textures}. We call this algorithm TRITON (Texture Recovering Image Translation Network): an unsupervised, end-to-end, stateless sim2real algorithm that leverages the underlying 3D geometry of input scenes by generating realistic-looking learnable neural textures. By settling on a particular texture for the objects in a scene, we ensure consistency between frames statelessly. Unlike previous algorithms, TRITON is not limited to camera movements -- it can handle the movement of objects as well, making it useful for downstream tasks such as robotic manipulation.