 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Networks for Symbolic Regression
Paper and Code
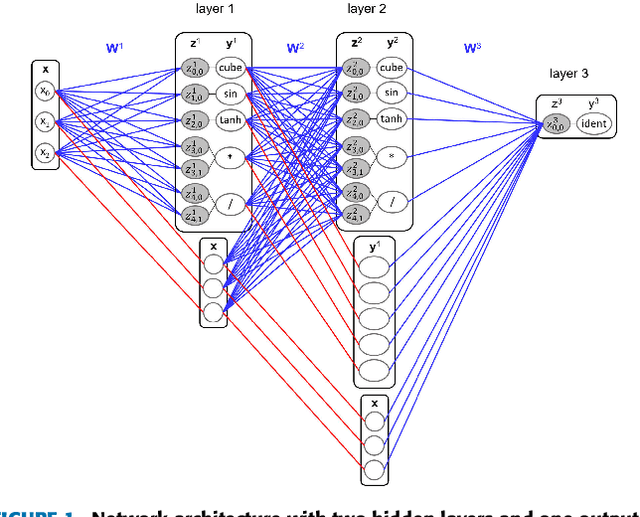
Many real-world systems can be described by mathematical formulas that are human-comprehensible, easy to analyze and can be helpful in explaining the system's behaviour. Symbolic regression is a method that generates nonlinear models from data in the form of analytic expressions. Historically, symbolic regression has been predominantly realized using genetic programming, a method that iteratively evolves a population of candidate solutions that are sampled by genetic operators crossover and mutation. This gradient-free evolutionary approach suffers from several deficiencies: it does not scale well with the number of variables and samples in the training data, models tend to grow in size and complexity without an adequate accuracy gain, and it is hard to fine-tune the inner model coefficients using just genetic operators. Recently, neural networks have been applied to learn the whole analytic formula, i.e., its structure as well as the coefficients, by means of gradient-based optimization algorithms. We propose a novel neural network-based symbolic regression method that constructs physically plausible models based on limited training data and prior knowledge about the system. The method employs an adaptive weighting scheme to effectively deal with multiple loss function terms and an epoch-wise learning process to reduce the chance of getting stuck in poor local optima. Furthermore, we propose a parameter-free method for choosing the model with the best interpolation and extrapolation performance out of all models generated through the whole learning process. We experimentally evaluate the approach on the TurtleBot 2 mobile robot, the magnetic manipulation system, the equivalent resistance of two resistors in parallel, and the anti-lock braking system. The results clearly show the potential of the method to find sparse and accurate models that comply with the prior knowledge provided.