 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeRF-SLAM: Real-Time Dense Monocular SLAM with Neural Radiance Fields
Paper and Code
Oct 24, 2022
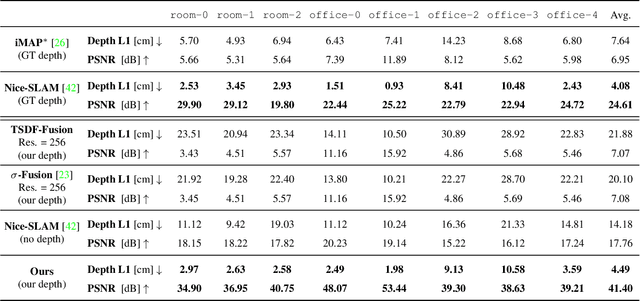


We propose a novel geometric and photometric 3D mapping pipeline for accurate and real-time scene reconstruction from monocular images. To achieve this, we leverage recent advances in dense monocular SLAM and real-time hierarchical volumetric neural radiance fields. Our insight is that dense monocular SLAM provides the right information to fit a neural radiance field of the scene in real-time, by providing accurate pose estimates and depth-maps with associated uncertainty. With our proposed uncertainty-based depth loss, we achieve not only good photometric accuracy, but also great geometric accuracy. In fact, our proposed pipeline achieves better geometric and photometric accuracy than competing approaches (up to 179% better PSNR and 86% better L1 depth), while working in real-time and using only monocular images.