 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeighbor Oblivious Learning (NObLe) for Device Localization and Tracking
Paper and Code
Nov 23, 2020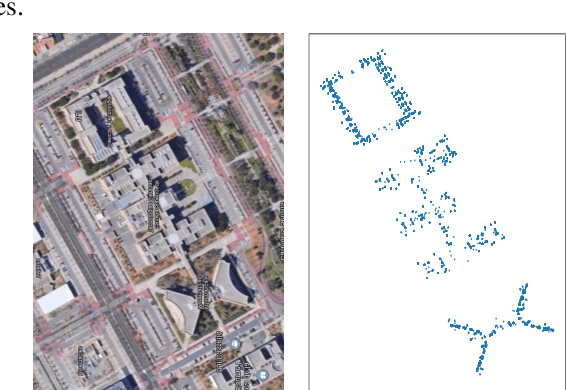
On-device localization and tracking are increasingly crucial for various applications. Along with a rapidly growing amount of location data, machine learning (ML) techniques are becoming widely adopted. A key reason is that ML inference is significantly more energy-efficient than GPS query at comparable accuracy, and GPS signals can become extremely unreliable for specific scenarios. To this end, several techniques such as deep neural networks have been proposed. However, during training, almost none of them incorporate the known structural information such as floor plan, which can be especially useful in indoor or other structured environments. In this paper, we argue that the state-of-the-art-systems are significantly worse in terms of accuracy because they are incapable of utilizing these essential structural information. The problem is incredibly hard because the structural properties are not explicitly available, making most structural learning approaches inapplicable. Given that both input and output space potentially contain rich structures, we study our method through the intuitions from manifold-projection. Whereas existing manifold based learning methods actively utilized neighborhood information, such as Euclidean distances, our approach performs Neighbor Oblivious Learning (NObLe). We demonstrate our approach's effectiveness on two orthogonal applications, including WiFi-based fingerprint localization and inertial measurement unit(IMU) based device tracking, and show that it gives significant improvement over state-of-art prediction accuracy.