 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNavigational Instruction Generation as Inverse Reinforcement Learning with Neural Machine Translation
Paper and Code
Oct 11, 2016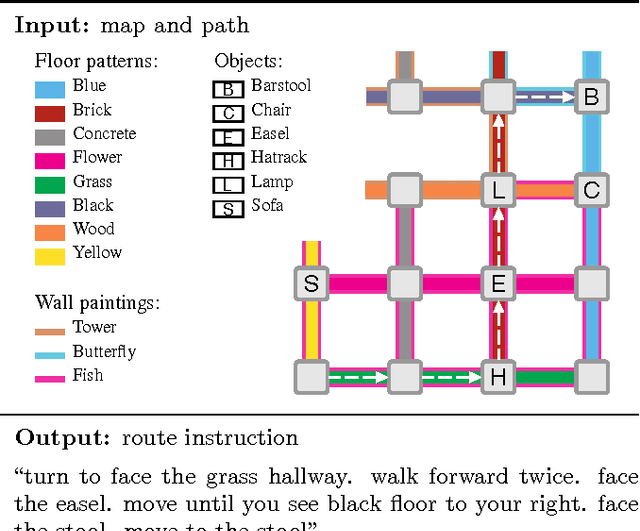

Modern robotics applications that involve human-robot interaction require robots to be able to communicate with humans seamlessly and effectively. Natural language provides a flexible and efficient medium through which robots can exchange information with their human partners. Significant advancements have been made in developing robots capable of interpreting free-form instructions, but less attention has been devoted to endowing robots with the ability to generate natural language. We propose a navigational guide model that enables robots to generate natural language instructions that allow humans to navigate a priori unknown environments. We first decide which information to share with the user according to their preferences, using a policy trained from human demonstrations via inverse reinforcement learning. We then "translate" this information into a natural language instruction using a neural sequence-to-sequence model that learns to generate free-form instructions from natural language corpora. We evaluate our method on a benchmark route instruction dataset and achieve a BLEU score of 72.18% when compared to human-generated reference instructions. We additionally conduct navigation experiments with human participants that demonstrate that our method generates instructions that people follow as accurately and easily as those produced by humans.