 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeN-QGN: Navigation Map from a Monocular Camera using Quadtree Generating Networks
Paper and Code
Feb 24, 2022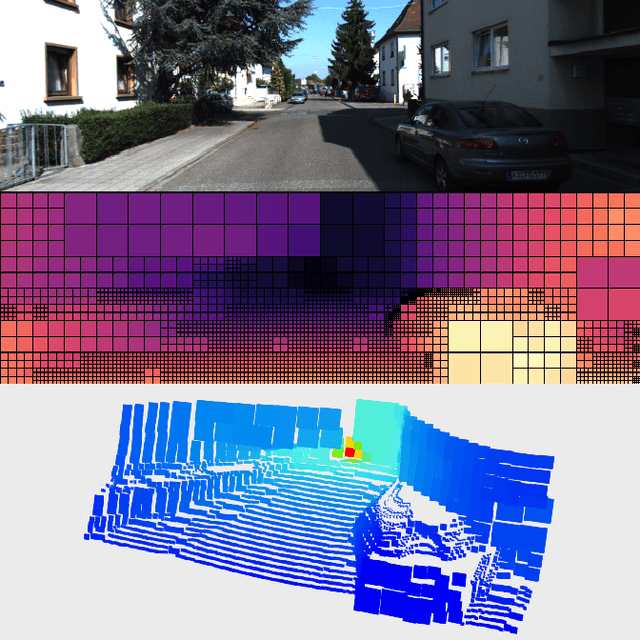
Monocular depth estimation has been a popular area of research for several years, especially since self-supervised networks have shown increasingly good results in bridging the gap with supervised and stereo methods. However, these approaches focus their interest on dense 3D reconstruction and sometimes on tiny details that are superfluous for autonomous navigation. In this paper, we propose to address this issue by estimating the navigation map under a quadtree representation. The objective is to create an adaptive depth map prediction that only extract details that are essential for the obstacle avoidance. Other 3D space which leaves large room for navigation will be provided with approximate distance. Experiment on KITTI dataset shows that our method can significantly reduce the number of output information without major loss of accuracy.