 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMutual Information Maximization for Robust Plannable Representations
Paper and Code
May 16, 2020
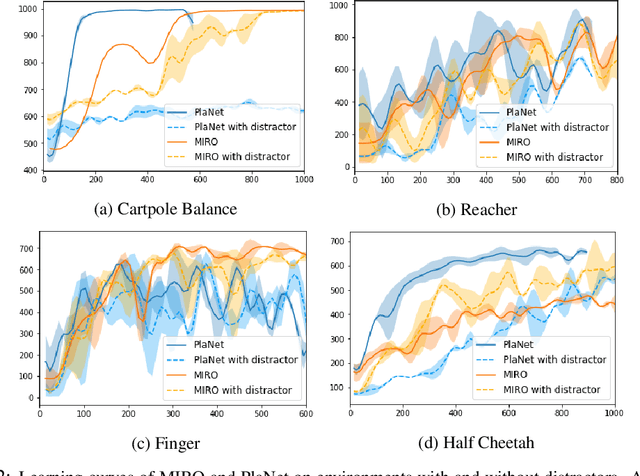
Extending the capabilities of robotics to real-world complex, unstructured environments requires the need of developing better perception systems while maintaining low sample complexity. When dealing with high-dimensional state spaces, current methods are either model-free or model-based based on reconstruction objectives. The sample inefficiency of the former constitutes a major barrier for applying them to the real-world. The later, while they present low sample complexity, they learn latent spaces that need to reconstruct every single detail of the scene. In real environments, the task typically just represents a small fraction of the scene. Reconstruction objectives suffer in such scenarios as they capture all the unnecessary components. In this work, we present MIRO, an information theoretic representational learning algorithm for model-based reinforcement learning. We design a latent space that maximizes the mutual information with the future information while being able to capture all the information needed for planning. We show that our approach is more robust than reconstruction objectives in the presence of distractors and cluttered scenes