 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultimodal Maximum Entropy Dynamic Games
Paper and Code
Feb 02, 2022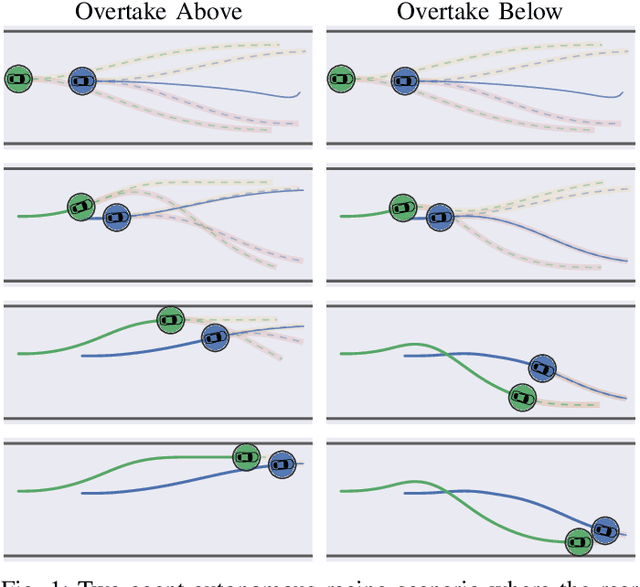
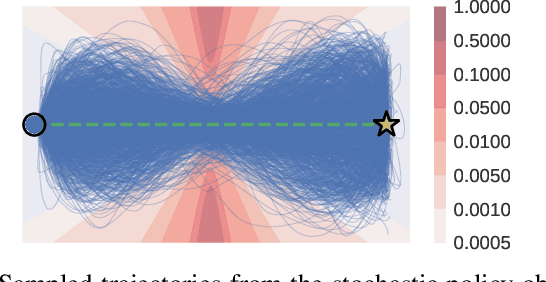
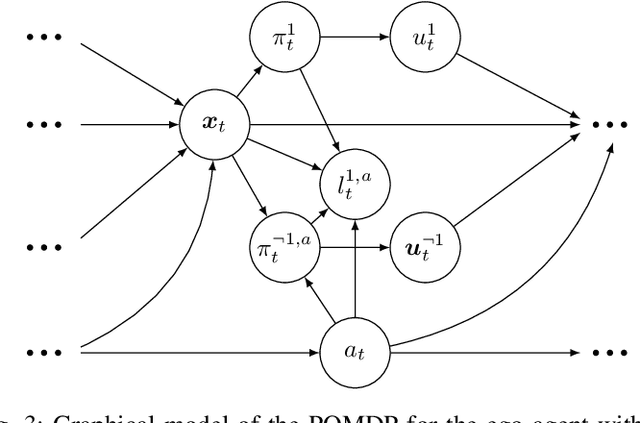

Environments with multi-agent interactions often result a rich set of modalities of behavior between agents due to the inherent suboptimality of decision making processes when agents settle for satisfactory decisions. However, existing algorithms for solving these dynamic games are strictly unimodal and fail to capture the intricate multimodal behaviors of the agents. In this paper, we propose MMELQGames (Multimodal Maximum-Entropy Linear Quadratic Games), a novel constrained multimodal maximum entropy formulation of the Differential Dynamic Programming algorithm for solving generalized Nash equilibria. By formulating the problem as a certain dynamic game with incomplete and asymmetric information where agents are uncertain about the cost and dynamics of the game itself, the proposed method is able to reason about multiple local generalized Nash equilibria, enforce constraints with the Augmented Lagrangian framework and also perform Bayesian inference on the latent mode from past observations. We assess the efficacy of the proposed algorithm on two illustrative examples: multi-agent collision avoidance and autonomous racing. In particular, we show that only MMELQGames is able to effectively block a rear vehicle when given a speed disadvantage and the rear vehicle can overtake from multiple positions.