 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-View Optimization of Local Feature Geometry
Paper and Code
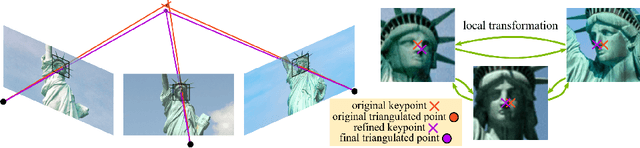
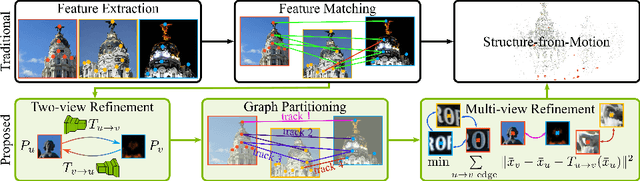
In this work, we address the problem of refining the geometry of local image features from multiple views without known scene or camera geometry. Current approaches to local feature detection are inherently limited in their keypoint localization accuracy because they only operate on a single view. This limitation has a negative impact on downstream tasks such as Structure-from-Motion, where inaccurate keypoints lead to large errors in triangulation and camera localization. Our proposed method naturally complements the traditional feature extraction and matching paradigm. We first estimate local geometric transformations between tentative matches and then optimize the keypoint locations over multiple views jointly according to a non-linear least squares formulation. Throughout a variety of experiments, we show that our method consistently improves the triangulation and camera localization performance for both hand-crafted and learned local features.