 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-View Guided Multi-View Stereo
Paper and Code
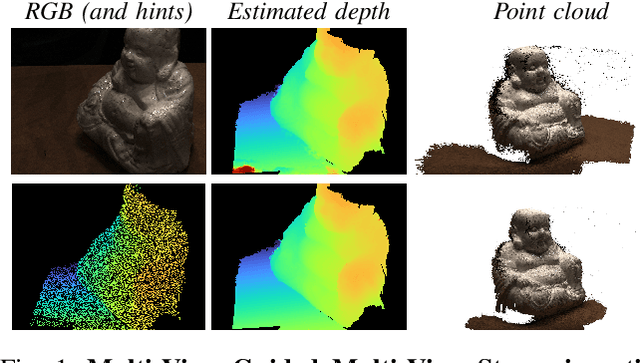
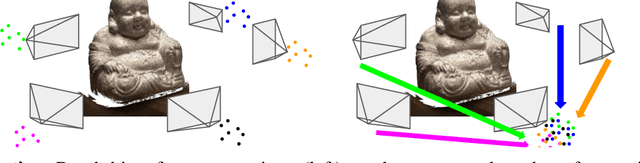

This paper introduces a novel deep framework for dense 3D reconstruction from multiple image frames, leveraging a sparse set of depth measurements gathered jointly with image acquisition. Given a deep multi-view stereo network, our framework uses sparse depth hints to guide the neural network by modulating the plane-sweep cost volume built during the forward step, enabling us to infer constantly much more accurate depth maps. Moreover, since multiple viewpoints can provide additional depth measurements, we propose a multi-view guidance strategy that increases the density of the sparse points used to guide the network, thus leading to even more accurate results. We evaluate our Multi-View Guided framework within a variety of state-of-the-art deep multi-view stereo networks, demonstrating its effectiveness at improving the results achieved by each of them on BlendedMVG and DTU datasets.