 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Robot Informative Path Planning for Active Sensing of Environmental Phenomena: A Tale of Two Algorithms
Paper and Code
Feb 05, 2013
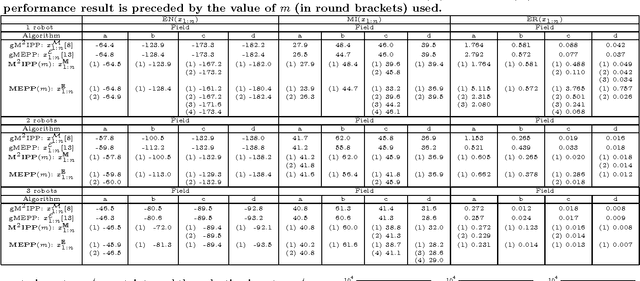
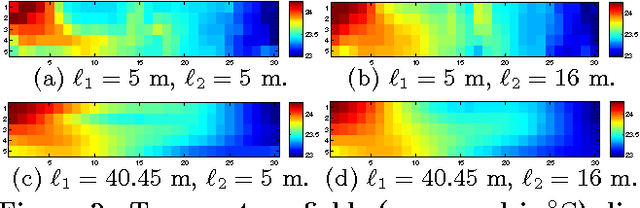
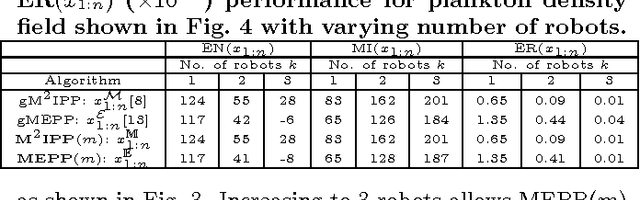
A key problem of robotic environmental sensing and monitoring is that of active sensing: How can a team of robots plan the most informative observation paths to minimize the uncertainty in modeling and predicting an environmental phenomenon? This paper presents two principled approaches to efficient information-theoretic path planning based on entropy and mutual information criteria for in situ active sensing of an important broad class of widely-occurring environmental phenomena called anisotropic fields. Our proposed algorithms are novel in addressing a trade-off between active sensing performance and time efficiency. An important practical consequence is that our algorithms can exploit the spatial correlation structure of Gaussian process-based anisotropic fields to improve time efficiency while preserving near-optimal active sensing performance. We analyze the time complexity of our algorithms and prove analytically that they scale better than state-of-the-art algorithms with increasing planning horizon length. We provide theoretical guarantees on the active sensing performance of our algorithms for a class of exploration tasks called transect sampling, which, in particular, can be improved with longer planning time and/or lower spatial correlation along the transect. Empirical evaluation on real-world anisotropic field data shows that our algorithms can perform better or at least as well as the state-of-the-art algorithms while often incurring a few orders of magnitude less computational time, even when the field conditions are less favorable.